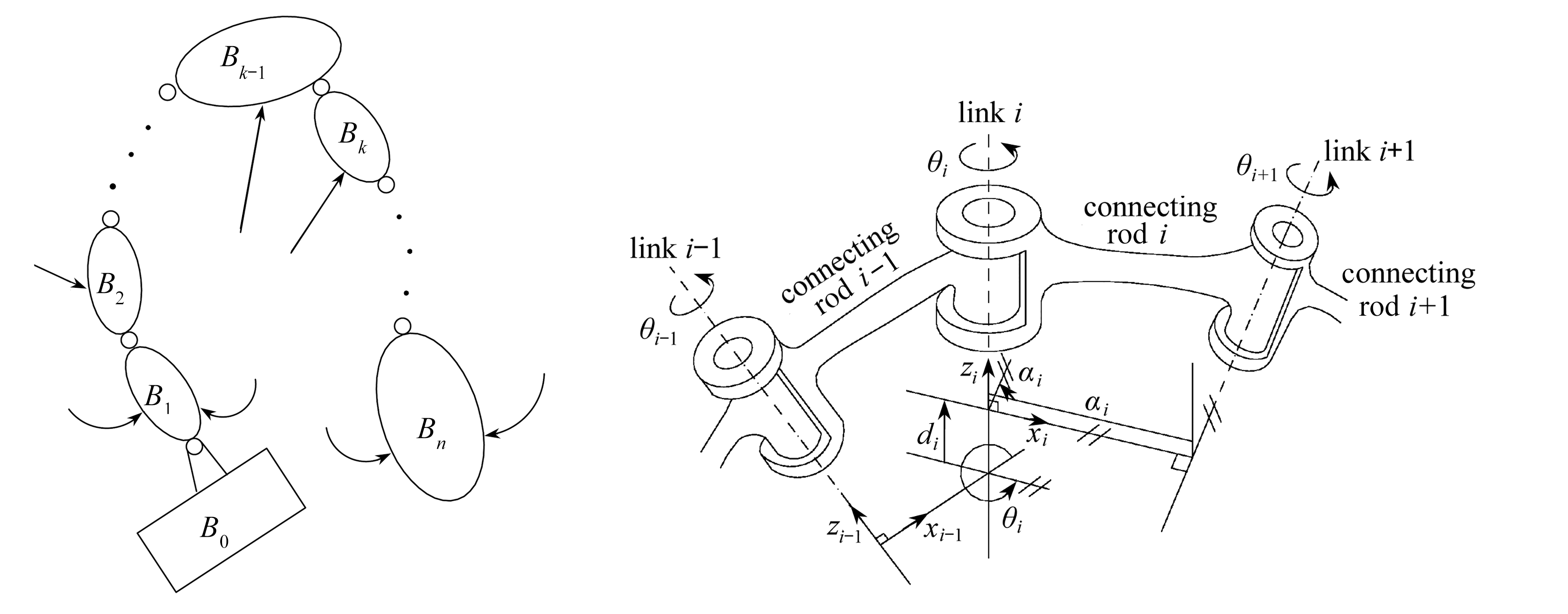
图1 受冲击的机械多体系统 图2 多体连杆式D-H坐标系
Fig.1 The mechanical multibody system under impact Fig.2 The multibody linkage with a D-H coordinate system
郑明亮, 冯 鲜,李文霞,曹亚玲
(无锡太湖学院,江苏 无锡 214064)
摘要:为给复杂机械多体系统碰撞动力学问题的定量和定性分析提供一个强有力新工具,该文将现代分析力学中的对称性理论引入到机械多体外碰撞动力学研究中.首先,基于冲量动量法推导系统碰撞动力学的Euler-Lagrange方程;其次,引进群分析理论,根据不变性原则给出系统存在Noether对称性与Lie对称性的各自条件方程以及得到相应守恒量的形式,为动力学方程的解析积分理论提供了有效途径.最后以一平面开环两连杆机构的碰撞力学为例进行实际分析运用.研究表明,借助对称性和守恒量可以得到机械多体系统动力学更深层次的力学规律和运动特性,可为系统更精确的动态优化设计和先进控制奠定理论基础.
关键词:机械多体系统; Euler-Lagrange方程; 对称性; 守恒量; 平面连杆
随着现代科学技术的发展,在实际工程中,尤其是在车辆、航天器、机构、机器人等领域中,出现了由许多刚体和柔性体以不同形式相互组成的机械系统,形成了一个独立的学科分支——多体系统动力学[1].在机械工程中存在着大量撞击现象,如航天器的空中交会对接接触冲击[2]、卫星太阳帆板和天线在轨展开与锁定中的关节处碰撞[3-4]、包装机构的间歇运动及构件间连接间隙引起的冲击[5]、机械臂的间隙内碰撞问题以及外冲击柔性构件的碰撞动力学[6-7]等.碰撞过程以其作用时间短、强度大给系统动力学性态造成了巨大影响,已经成为系统分析和控制中不可忽略的重要因素.现在碰撞问题己经成为机械多体动力学研究的重要领域之一[8-12].碰撞动力学从力学本质上是一种变边界、非定常、高度非线性非连续动力学过程[13].围绕机械多体系统碰撞动力学研究的首要任务就是:① 建立系统运动学和动力学的通用型方程模型;② 运动学规律和动力学响应的高效准确计算方法.
动力学系统对称性理论是理论物理、工程数学、现代力学等学科中更高层次的法则,对系统运动方程对称性的研究有助于揭示力学系统的内在特征和深层次规律[14].力学系统的对称性和守恒量有着密切的关系,而系统的守恒量不仅具有明显的物理意义,而且还是系统的首次积分,可以降阶约化方程.因此,对称性理论也是积分运动方程的一个有效方法,用对称性寻求系统守恒量的方法主要有Noether对称性[15]和Lie对称性[16].然而,目前,机械多体系统碰撞动力学的研究主要采用数值积分算法或者CAD/CAE软件联合仿真设计计算等,在解析积分理论方面一直很少有文献涉及,由于困难重重,仍处于开始阶段.众所周知,微分方程的解析解更可以直观反映系统参数之间的定量显示关系和非线性系统大范围的全局性质,而守恒量也可以作为设计差分计划以提高数值算法的精度,因此本文研究机械多体系统碰撞动力学的对称性和守恒量具有十分重要的意义.
目前按照对碰撞过程假设的不同,可以将其建模方法分为以下3种类型:冲量动量法、连续碰撞力模型和基于连续介质力学的有限元方法.冲量动量法是根据冲力可按有势力处理和广义冲量-动量方程获得碰撞后系统的运动状态的一种方法,是最为经典的刚体碰撞理论.它应用方便,计算效率高,本节就是根据此理论用分析力学的方法建立外在冲击力作用下机械多体系统动力学的Euler-Lagrange方程.
设所研究的机械多体系统由作为参考体的零刚体B0和n个刚体Bi(i=1,2,…,n),用五类运动副(即柱铰和移动铰)连成,其上受有任意多个方向和大小已知的外冲量,如图1.对系统建立D-H形式的连体坐标架,如图2.
图1 受冲击的机械多体系统 图2 多体连杆式D-H坐标系
Fig.1 The mechanical multibody system under impact Fig.2 The multibody linkage with a D-H coordinate system
令iri为固定在刚体Bi上的一个点,齐次坐标为[xi,yi,zi,1]T,用qi代表关节i的广义坐标(它可以是转动关节θi,也可是移动关节di),则点iri的速度Vi为
(1)
其中联系第i和i-1刚体坐标系的4×4齐次坐标变换矩阵i-1Ai为
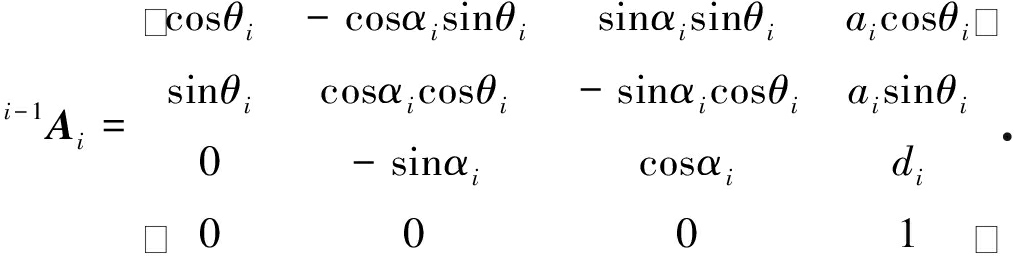
(2)
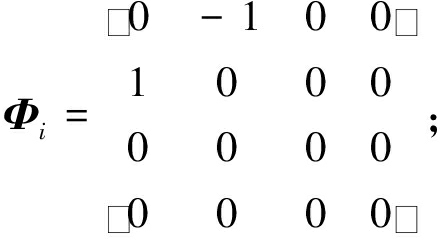
对于转动关节,式中αi,ai,di是常数,而θi是关节变量,令
对于移动关节,式中αi,ai,θi是常数,而di是关节变量,

则刚体Bi的动能为

(3)
式中tr表示对矩阵求迹.
设![]() 表示作用在第i刚体Bi上的第j个外冲量,则刚体Bi的冲量势为
表示作用在第i刚体Bi上的第j个外冲量,则刚体Bi的冲量势为
(4)
式中![]() 表示冲量
表示冲量![]() 作用点在e(i)中的位置.
作用点在e(i)中的位置.
约束力学系统在碰撞过程中拉氏方程仍然成立,其形式为[17]
(5)
注意,Lagrange函数L中的势能P中包括了冲力势P1和其他力势P2,把方程(5)两边乘以dt,并在冲击时间间隔Δτ内积分,有如下分析形式的碰撞方程:
(6)
因此得到具体显式的机械多体系统碰撞动力学方程为
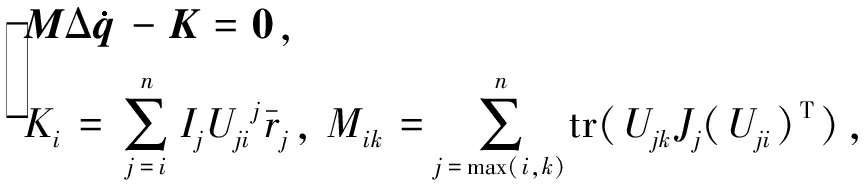
(7)
Δ为碰撞前后的差符号,上式与有外冲力作用时机械多体系统的的Kane方程结果是一致的,若M非奇异,则机械多体系统的碰撞动力学方程是一阶方程组,该方程组与系统碰撞前的初值有很大关系.
机械多体动力学系统中存在Hamilton作用量的形式为
(8)
注意因为是碰撞问题,上面已经指出势能一定要包括冲力势.
取时间和坐标的无限小变换:
(9)
其中,ξ0,ξs为无限小生成函数.
系统的广义准Noether对称性是指在变换(9)下作用量(8)的全变分满足
(10)
其中,![]() 为规范函数,Qs为非势广义力.
为规范函数,Qs为非势广义力.
根据全变分与等时变分的关系![]() 式(10)展开可得到
式(10)展开可得到
(11)
这就是系统Noether对称性决定的生成元ξ0,ξs满足的判据方程.
连续变换的对称性都对应着一条守恒定律(首次积分),进而可使微分方程达到降阶和约化,守恒律是动力学系统更深层次的规律,在动力学方程的可积性、线性化、运动常数以及稳定性方面有重要作用.Noether对称性可直接导致一类Noether守恒量,再结合初始条件,从而很容易解出原振动系统的精确响应解.系统Noether守恒量的形式为
(12)
直接对上式左边积分可得到
dIN/dt=0.
与Noether理论研究思路不同的是,Lie对称性是直接研究运动微分方程在无限小变换下的不变性.上文已指出,非奇异机械多体系统碰撞动力学的方程是一阶微分方程组:
(13)
同样引进无限小变换(9),机械多体系统的Lie对称性是指微分方程(13)在上述无限小变换(9)下形式不变,即
(14)
上式也可以表述成Lie对称性确定方程为
(15)
与Noether对称性不同的是,一般情况下Lie对称性不一定直接导致守恒量.下面给出Lie对称性导致守恒量的条件和形式.
如果生成元ξ0,ξs满足Lie对称性相应的确定方程且还存在规范函数![]() 满足如下的结构方程:
满足如下的结构方程:
(16)
则Lie对称性导致新型守恒量:
(17)
直接对上式左边积分可得到
dIN/dt=0.
某平面两匀质杆OA和AB质量均为m,长均为l,铰接于A处,几何示意如图3所示,开始时两杆铅直静止,今在AB杆的中点D作用一与杆垂直的水平冲量,试研究此系统冲击后的对称性和守恒量问题.

图3 平面两杆机构几何模型
Fig.3 The geometric model for a planar 2-bar mechanism
用分析力学的方法,可避开支座和铰链处的内力分析,取角α,β为系统的广义坐标,点C和D为两杆的质心,则系统的动能为
(18)
仿照广义力计算,来算冲量势对应的广义冲量,给α一个变分,固定β不变,给β一个变分,固定α不变,得到
(19)
冲击前,系统静止,则系统的初始条件为:![]() 则根据机械多体系统碰撞动力学的Euler-Lagrange方程(6)得
则根据机械多体系统碰撞动力学的Euler-Lagrange方程(6)得
(20)
假设冲击过程中,两杆的位移变形忽略不计,则上式可化简为

(21)
这是一个解耦的一阶线性微分方程组.
包含冲力势的系统Lagrange函数为
(22)
引进无限小变换(9),则生成元满足的系统Noether等式方程为
(23)
显然上式有如下解:
ξ0=1,ξ1=ξ2=0,GN=0.
(24)
则系统的Noether守恒量为
(25)
很明显,上式代表了系统的能量守恒定律.
生成元满足的系统Lie对称性确定方程和结构方程为
(26)
上式可存在解为

(27)
则对应的守恒量为
(28)
很明显,上式代表了系统的动量守恒定律.
上述Noether对称性和Lie对称性代入变量α,β的具体取值,就可以得到更为具体的守恒量大小.本文的这些内容将增进对于机械多体系统碰撞运动内在力学本质的深入理解,可促进多体动力学的研究.
对称性理论内容丰富,在数理科学和工程科技中具有广阔的运用前景.机械多体系统碰撞动力学在计算机技术结合的大前提下,对其自身的积分理论研究也显得十分必要.本文将机械多体系统的研究内容进行归纳整理,主要介绍了碰撞动力学方程的数学建模、Noether对称性和守恒量、Lie对称性和守恒量.上述方法易于标准化,随着符号软件技术的引用,上述过程求解将十分高效,不仅可以得到系统动态响应的首次积分,同时这也为数值计算提供了有效的验证手段.进一步地,本文的研究方法可推广到包含复杂边界约束条件(非理想)下的机械多体系统碰撞动力学的研究中.
参考文献:
[1] 吴洪涛, 熊有伦.机械工程中的多体系统动力学问题[J].中国机械工程, 2000,11(8): 608-610.(WU Hongtao, XIONG Youlun.Multibody system dynamics problems in mechanical engineering[J].ChinaMechanicalEngineering, 2000,11(8): 608-610.(in Chinese))
[2] 尤超蓝, 洪嘉振.空间交会对接过程的动力学模型与仿真[J].动力学与控制学报, 2004,2(2): 23-28.(YOU Chaolan, HONG Jiazhen.Dynamic model and simulation of space rendezvous and docking procedure[J].JournalofDynamicsandControl, 2004,2(2): 23-28.(in Chinese))
[3] 刘锦阳, 洪嘉振.卫星太阳能帆板的撞击问题[J].宇航学报, 2000,21(3): 34-38.(LIU Jingyang, HONG Jiazhen.Contact-impact of satellite’s plates[J].JournalofAstronautics, 2000,21(3): 34-38.(in Chinese))
[4] 邹元杰, 韩增尧, 白照广, 等.航天器柔性多体结构锁定撞击动力学分析与试验验证[J].强度与环境, 2011,38(1): 42-51.(ZHOU Yuanjie, HAN Zengyao, BAI Zhaoguang, et al.Impact analysis and test verification of flexible multi-body spacecraft structures in the latching process[J].Structure&EnvironmentEngineering, 2011,38(1): 42-51.(in Chinese))
[5] 杨晓谦.运输过程中堆码包装件碰撞分析[D].硕士学位论文.无锡: 江南大学, 2011.(YANG Xiaoqian.The transport process of stacking package collision analysis[D].Master Thesis.Wuxi: Jiangnan University, 2011.(in Chinese))
[6] 陈钢, 贾庆轩, 孙汉旭, 等.空间机器人目标捕获过程中碰撞运动分析[J].机器人, 2010,3(1): 432-438.(CHEN Gang, JIA Qingxuan, SUN Hanxu, et al.Analysis on impact motion of space robot in the object capturing process[J].Robot, 2010,3(1): 432-438.(in Chinese))
[7] 华卫江, 章定国.柔性机器人系统碰撞动力学建模[J].机械工程学报, 2008,43(12): 222-228.(HUA Weijiang, ZHANG Dingguo.Modeling of impact dynamics of flexible robots[J].JournalofMechanicalEngineering, 2008,43(12): 222-228.(in Chinese))
[8] 解江, 李翰, 周书婷, 等.爆炸冲击载荷下航空铝合金平板动态响应数值分析方法[J].应用数学和力学, 2017,38(4): 410-420.(XIE Jiang, LI Han, ZHOU Shuting, et al.A numerical method for dynamic responses of aviation aluminum alloy plates under blast loads[J].AppliedMathematicsandMechanics, 2017,38(4): 410-420.(in Chinese))
[9] 秦于越, 邓子辰, 胡伟鹏.偏心冲击荷载作用下薄圆板动力学响应的保结构分析[J].应用数学和力学, 2014,35(8): 410-420.(QIN Yuyue, DENG Zichen, HU Weipeng.Dynamic analysis of circular thin plates under eccentric impact load with the structure-preserving method[J].AppliedMathematicsandMechanics, 2014,35(8): 410-420.(in Chinese))
[10] STRONGE W J.ImpactMechanics[M].Cambridge: Cambridge University Press, 2000.
[11] SEIFRIED R, SCHIEHLEN W, EBERHARD P.Numerical and experimental evaluation of the coefficient of restitution for repeated impacts[J].InternationalJournalofImpactEngineering, 2005,32(1): 508-524.
[12] AMBROSIO J, POMBO J, RAUTER F, et al.A memory based communication in the co-simulation of multibody and finite element codes for pantograph-catenary interaction simulation[J].MultibodyDynamics, 2009,12: 231-252.
[13] 董富祥, 洪嘉振.多体系统动力学碰撞问题研究综述[J].力学进展, 2009,39(3): 352-359.(DONG Fuxiang, HONG Jiazhen.Review of impact problem for dynamics of multibody system[J].ProgressinMechanics, 2009,39(3): 352-359.(in Chinese))
[14] LEONE R, GOURIEUX T.Classical Noether’s theory with application to the linearly damped particle[J].EuropeanJournalofPhysics, 2015,36(6): 065022.
[15] BALSEIRO P.Hamiltonization of solids of revolution through reduction[J].JournalofNonlinearScience, 2017,27(6): 2001-2035.
[16] SINGLA K, GUPTA R K.Conservation laws for certain time fractional nonlinear systems of partial differential equations[J].CommunicationsinNonlinearScienceandNumericalSimulation, 2017,53: 10-21.
[17] 章定国.多刚体系统的外碰撞动力学方程[J].应用数学和力学, 1997,18(6): 551-555.(ZHANG Dingguo.Exterior collision dynamic equations of multi rigid body system[J].AppliedMathematicsandMechanics, 1997,18(6): 551-555.(in Chinese))
ZHENG Mingliang,FENG Xian,LI Wenxia,CAO Yalin
(WuxiTaihuUniversity,Wuxi,Jiangsu214064,P.R.China)
Abstract:To provide a powerful new tool for quantitative and qualitative analysis of collision dynamics in complex mechanical multibody systems, the symmetry theory in modern analytical mechanics was introduced into the study of mechanical multibody external collision dynamics.Firstly, the Euler-Lagrange equation of collision dynamics was derived based on the momentum method; secondly, the group theory was introduced, then, according to the invariance principle, the condition equations for the Noether symmetry and the Lie symmetry were obtained and the corresponding conserved quantity form was got, which made possible an effective approach to the analytic integral theory for dynamic equations.Finally, the collision dynamics of a planar open-loop 2-connecting-rod mechanism was taken as an example for application and analysis.Research shows that deeper mechanical laws and motion characteristics of mechanical multibody system collision dynamics can be obtained by means of symmetries and conserved quantities, and the results also lay a theoretical foundation for more precise dynamic optimal design and advanced control.
Key words:mechanical multibody system; Euler-Lagrange equation; symmetry; conserved quantity; plane connecting rod
作者简介:郑明亮(1988—),男,讲师,博士(通讯作者.E-mail: zhmlwxcstu@163.com).
基金项目:江苏省高等学校自然科学基金(18KJB460027)
修订日期:2018-03-17
*收稿日期:2017-11-21;
文章编号:1000-0887(2018)11-1292-08
文献标志码:A DOI: 10.21656/1000-0887.380291
中图分类号:TH122; O316
① 引用本文/Citethispaper:
郑明亮, 冯鲜, 李文霞, 曹亚玲.机械多体系统碰撞动力学的对称性和守恒量研究[J].应用数学和力学, 2018,39(11): 1292-1299.
ZHENG Mingliang,FENG Xian,LI Wenxia,CAO Yalin.Study on symmetries and conserved quantities of mechanical multibody system collision dynamics[J].AppliedMathematicsandMechanics, 2018,39(11): 1292-1299.