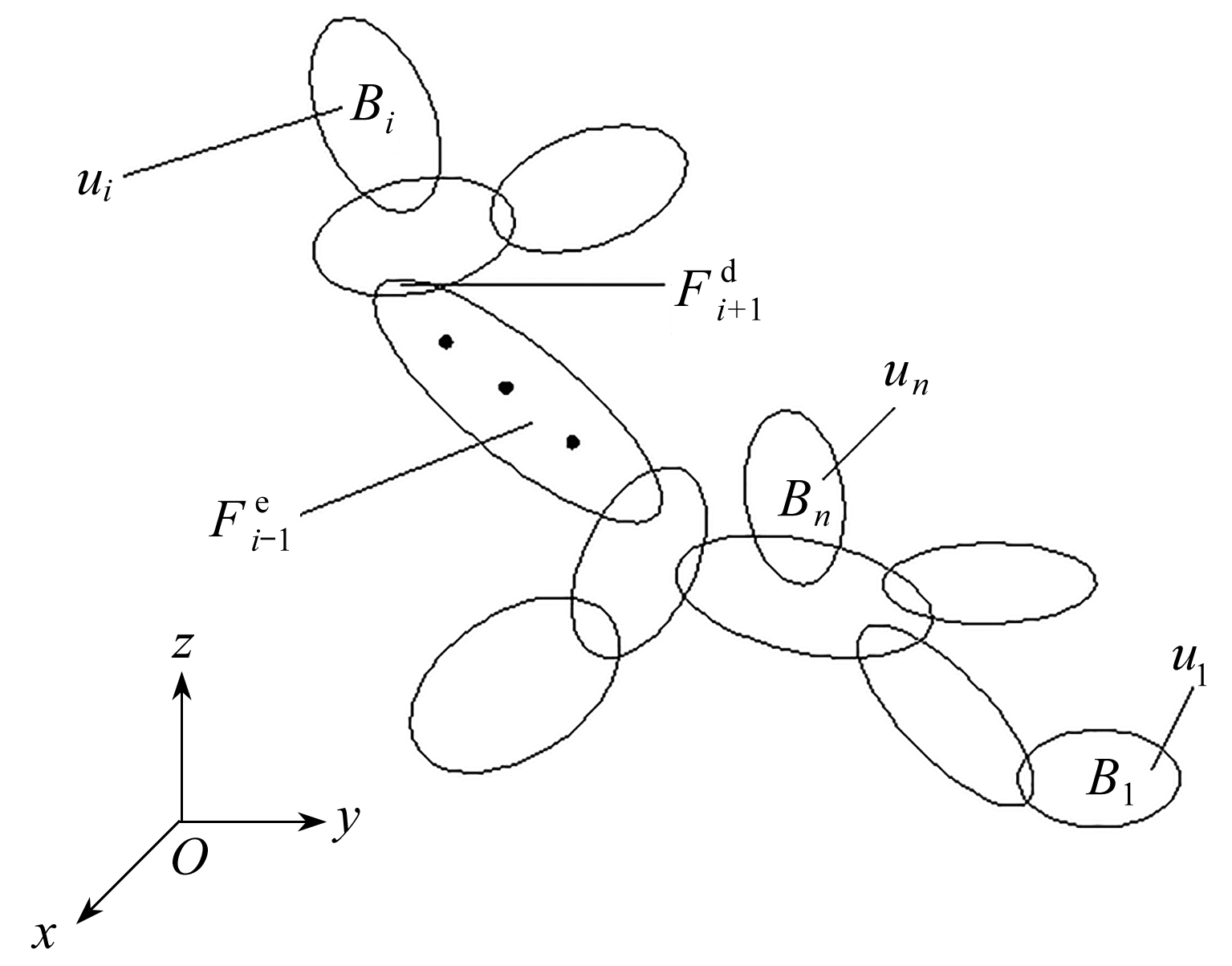
图1 受控非树形多体系统
Fig. 1 A controlled non-tree multibody system
郑明亮
(浙江理工大学 机械与自动控制学院, 杭州 310018)
摘要: 基于群不变性原理求解了机械多体动力学系统非线性最优控制问题的Noether型守恒定律.该文主要研究一类理想完整约束下的受控机械多刚体系统,通过增广向量法将动力学Euler-Lagrange方程以状态空间形式表示,利用变分法得到最优控制问题最优解的状态方程、伴随方程和控制方程,对系统性能指标泛函进行包含时间、状态变量、协态变量和控制变量的Noether对称无限小变换,进而得到最优解方程组的守恒量,使最优解关系以一组代数方程形式表达,为最优解的积分方法以及各种数值算法都奠定了坚实基础.最后,以基础振动下机械臂非线性动力学的能量最优控制实例分析,说明了该文对称性方法的正确性.
关 键 词: 多体系统; 最优控制; Noether对称性; 守恒律; 机械臂动力学
随着现代科学技术的发展,在实际工程中,尤其是在车辆、航天器、机器人、军工武器等领域中,出现了由大量结构体相互联结而构成的复杂系统,形成了一个独立的学科分支——机械多体系统动力学[1].任何力学系统想要更加“灵巧”,必须结合先进控制策略.因此,对受控(带有控制信号)机械多体系统动力学性能的快速准确评估和控制设计已越发凸显出其巨大的必要性.随着计算机技术融入,受控多体系统动力学分析与控制的建模过程和复杂计算都可以完全程序化编程和软件仿真,使其在机械工程中取得了很大的发展和成就[2-10].最优控制是现代控制理论中一个核心活跃分支,实际中的许多控制问题大都可以归结为在特定约束条件下某个或某些变量最小的优化问题.机械多体系统动力学最优控制问题是指在控制理论的基本框架之下,结合系统的动力学规律,选择最优的控制规律,以期达到高效利用资源、发挥最大效益、保持系统稳定等,它是机械动力学领域最具工程实践价值的主要课题[11-15].目前机械多体系统动力学最优控制问题研究主要有间接法、直接法和离散法.这3种方法都是数值计算方法,主要区别在于离散化的步骤不一样.无论哪种方法都存在误差以及违约现象.众所周知,古典变分法、Pontryagin极大值原理最后需要解决的是求解必要条件KKT方程,而Bellman动态规划虽绕开了变分运算,但其关键是求解HJB递推方程.关于KKT以及HJB方程的各种数值积分计算是最优控制问题研究中的主要手段,而关于解析积分理论方面的研究一直少有探讨.
在最优控制理论研究中,引入现代数学和力学方法中的对称性和守恒量工具,国内刊物上几乎少有报道,在国外刊物[16-19]上报道也不多.动力学系统的对称性理论是研究非线性微分方程定量问题最可能统一的通用工具,同时它和守恒量密切相关.受控系统的守恒律(首次积分)在最优控制问题中的作用是降低系统状态空间模型的自由度,从而降低反馈控制策略的维数,促进由最优性必要条件给出的微分方程的直接积分方法求解,同时守恒量也可作为设计差分计划以提高数值算法的精度.因此本文研究机械多体系统最优控制问题的对称性和守恒量具有十分重要的理论和实际意义.
机械多体系统按照所受约束可分为开链无约束系统、理想完整约束系统和非完整约束系统.目前推导机械多体系统动力学模型的方法有很多,如Kane法、Huston法、Roberson-Wittenburg法、Steihaug法、传递矩阵法等,由于分析力学是从能量角度出发并且充分利用约束,由此得到的Euler-Lagrange方程具有通用性和适应范围广等特点.不失一般性,下面主要研究带有控制力作用的多刚体非树形系统的动力学,如图1所示.
图1 受控非树形多体系统
Fig. 1 A controlled non-tree multibody system
单个刚体的位置由3个Cartesius(笛卡儿)坐标(x,y,z)T确定,姿态由3个Euler(欧拉)角(φ,θ,φ)T确定.qi为Cartesius坐标和Euler角组成的广义坐标.非树形铰链坐标将不再独立,根据系统的拓扑结构和铰链类型可建立系统的代数几何约束方程:
g(t,q)=0, g∈Rm,
(1)
其中,m为约束方程数.根据Hamilton原理可以得到考虑约束的第二类Euler-Lagrange运动方程为[20]
(2)
其中约束乘子μ可由约束的相容性和稳定性完全确定为![]() 的函数,L为系统的Lagrange函数,
的函数,L为系统的Lagrange函数,![]() 表示系统的耗散力(阻尼作用),
表示系统的耗散力(阻尼作用),![]() 表示系统的激励力,
表示系统的激励力,![]() 表示系统所受主动或者反馈控制力,一般为控制信号量u的线性函数.
表示系统所受主动或者反馈控制力,一般为控制信号量u的线性函数.
将受控动力学方程改写成状态空间形式,有很多方法如Legendre变换法、增广空间法等,因为需要考虑约束的存在,对于非奇异系统,将约束关于时间求一次导,利用增广空间法,引进向量![]() 则受控机械多体系统的非线性状态空间方程为(假设终端时间固定而状态自由)
则受控机械多体系统的非线性状态空间方程为(假设终端时间固定而状态自由)
(3)
机械多体系统动力学最优控制是指:在系统运动基本动力学规律(状态空间方程)限制下,从一类允许的控制方案中找出一个最优控制策略,使系统的运动在由某个初始状态转移到指定目标状态的同时,其性能指标值(常指控制力总量、运动总时间、运动总形变等)为最优.带终端项性能指标一般代价积分泛函形式为(Bolza(波尔扎)型)
J(Z,u)=Φ[Z(tf),tf]+![]() L0[Z(t),u(t),t]dt.
L0[Z(t),u(t),t]dt.
(4)
对于控制作用量u(能量有界连续函数)无其他限制条件时,可用带Lagrange乘子λT=[λ1,…,λn,λn+1,…,λ2n]的变分法处理泛函极值,构造系统类比形式的Hamilton函数:
H0[Z(t),u(t),λ(t),t]=λT(t)f[Z(t),u(t),t]+L0[Z(t),u(t),t],
(5)
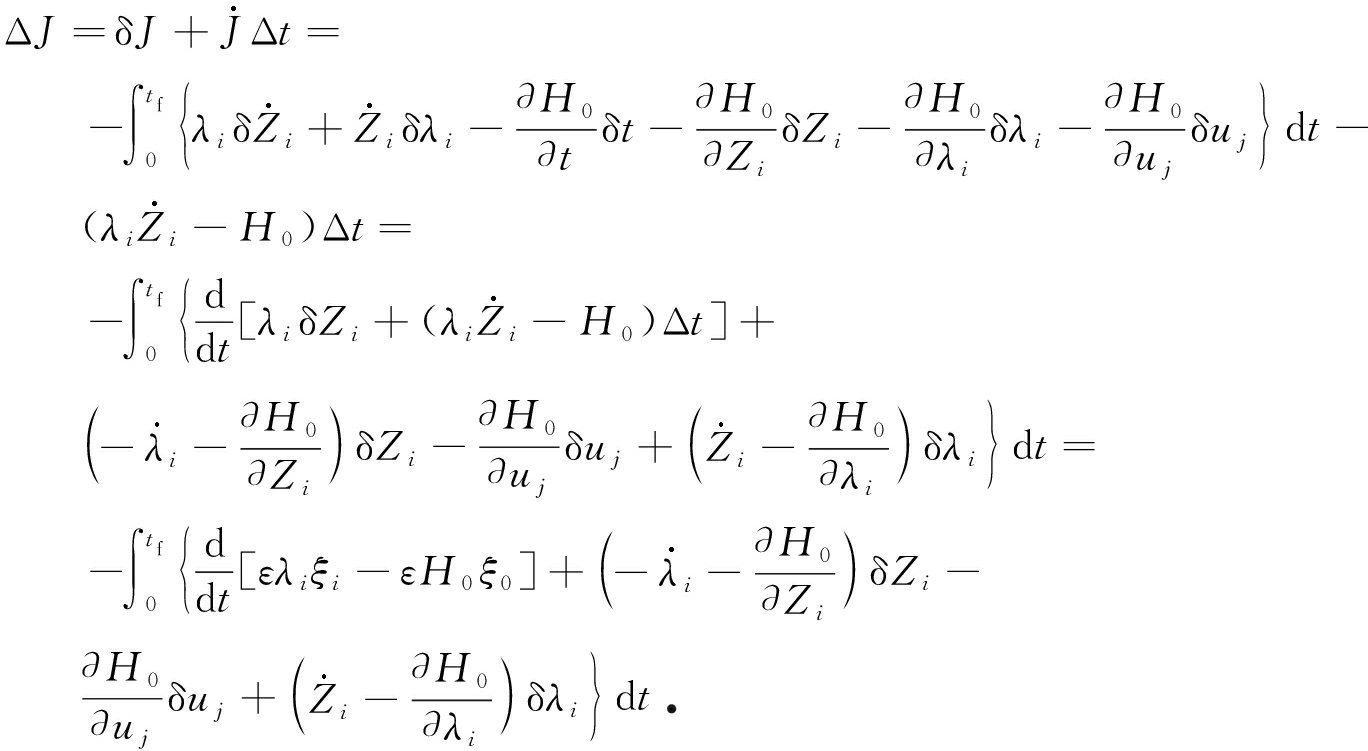
取增广泛函J的一阶变分并令其为零,得

(6)
由于
(7)
将式(7)代入式(6),并注意到δZ(0)=0,可得

(8)
由于δZ,δu,δλ都是任意的,并且相互独立,得到控制系统达到最优的必要条件为

(9)
式(9)实际是微分方程两点边值问题加代数方程,可先从代数方程入手,再代入微分方程,联立求解上述状态方程、伴随方程和控制方程,就可求得最优控制变量u*(t)、最优状态轨线Z*(t)和最优协态轨线λ*(t).
受控多体系统一般是一类结构化的非线性控制系统,对于上述方程(9)是一组多维非线性微分代数混合方程组,想要得到其解析解表达式是极其困难的,那么能否对最优解(9)进行降阶处理,进而用成熟的积分方法直接解析求解呢?为此,下面对最优控制问题引进Noether对称性理论.
分别对时间t、状态变量Zi、协态变量λi和控制变量uj引入无限小变换:
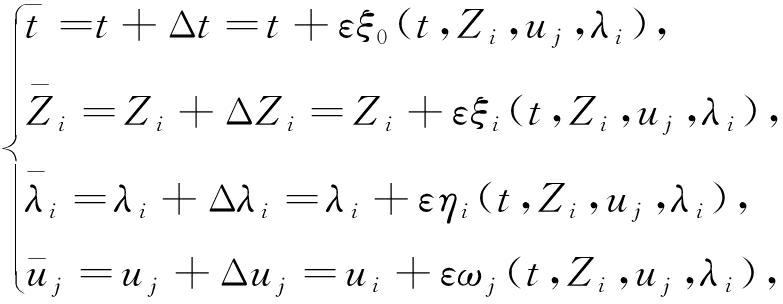
(10)
其中,ε为无限小参数,ξ0,ξi,ηi,ωj为无限小变换的生成函数.
如果最优控制问题的性能指标函数(4)是无限小群变换(10)的准不变量,即对每一个无限小变换,始终成立:
(11)
其中G=G(t,Zi,uj,λi)是显示规范函数,则称变换(10)为多体动力学控制系统的Noether准对称变换.
注意全变分与等时变分有以下关系式:
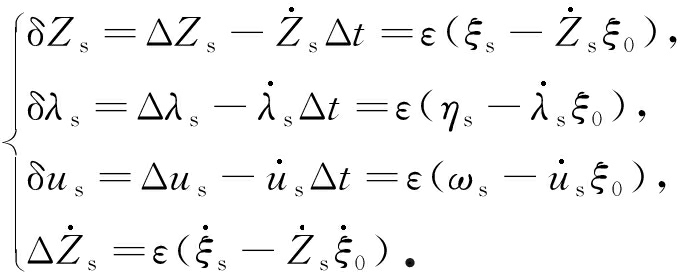
(12)
性能指标函数J的全变分可为
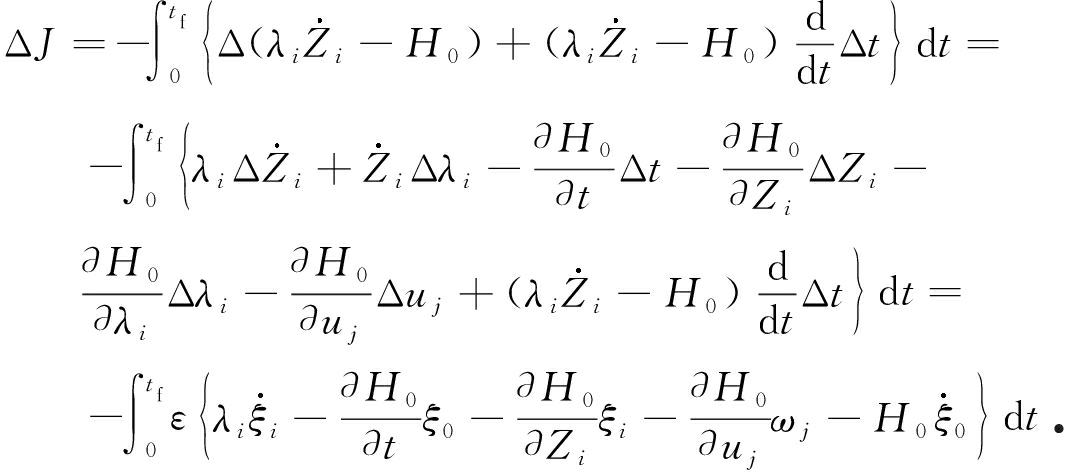
(13)
联立(11)和(13)得动力学控制系统的Noether恒等式为
(14)
式(14)就是机械多体系统动力学最优控制问题的Noether准对称性的判据方程.
为了更直观地表达,展开式(14),并采用合并对等技巧,可将Noether恒等式转化为Killing方程:

(15)
注意到式(14)中即使并没有出现生成函数ηi,但是从式(12)中很容易得到
(16)
同样J的全变分也可表述为
(17)
联立式(11)、(17)和最优性条件方程(9)得动力学控制系统的Noether型守恒量为
I=λiξi-H0ξ0+G=const.
(18)
式(18)就是多体系统动力学最优控制问题的守恒律,也是最优条件方程(9)的首次积分.很明显守恒律(18)相比最优性条件方程(9)降阶了,是一组代数方程,若能够求出足够多组独立的生成元和规范函数,则系统最优解将存在多组守恒定律(18),结合消元法和初始条件等,可使方程(9)的求解进一步变得简单明了.
某由车辆运动引起的安装在车辆上的机械臂的简化模型如图2所示,机械臂绕质量块上的转轴在垂直平面内转动,机械臂施加在质量块上的力忽略不计.求在关节处所施加的控制力矩耗能最小条件下该系统的最优控制器设计存在的守恒律.
把质量块当作额外的连杆,使问题变成二连杆问题,系统的Lagrange函数和耗散能为
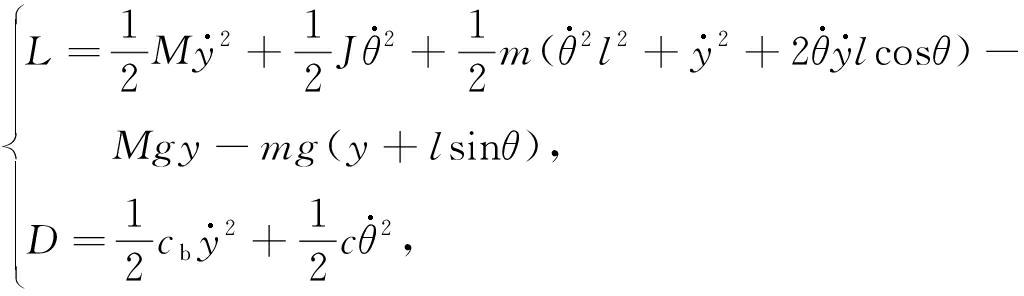
(19)
其中y,θ为质量块位移和机械臂的角位移,l为机械臂质心到其转轴的距离,J为机械臂关于转轴的转动惯量,M,m为质量块和机械臂的质量,cb,c为基础移动和机械臂转轴处的阻尼系数,g为重力加速度,τ为施加在机械臂上的转矩,也是本例中的控制信号作用量.
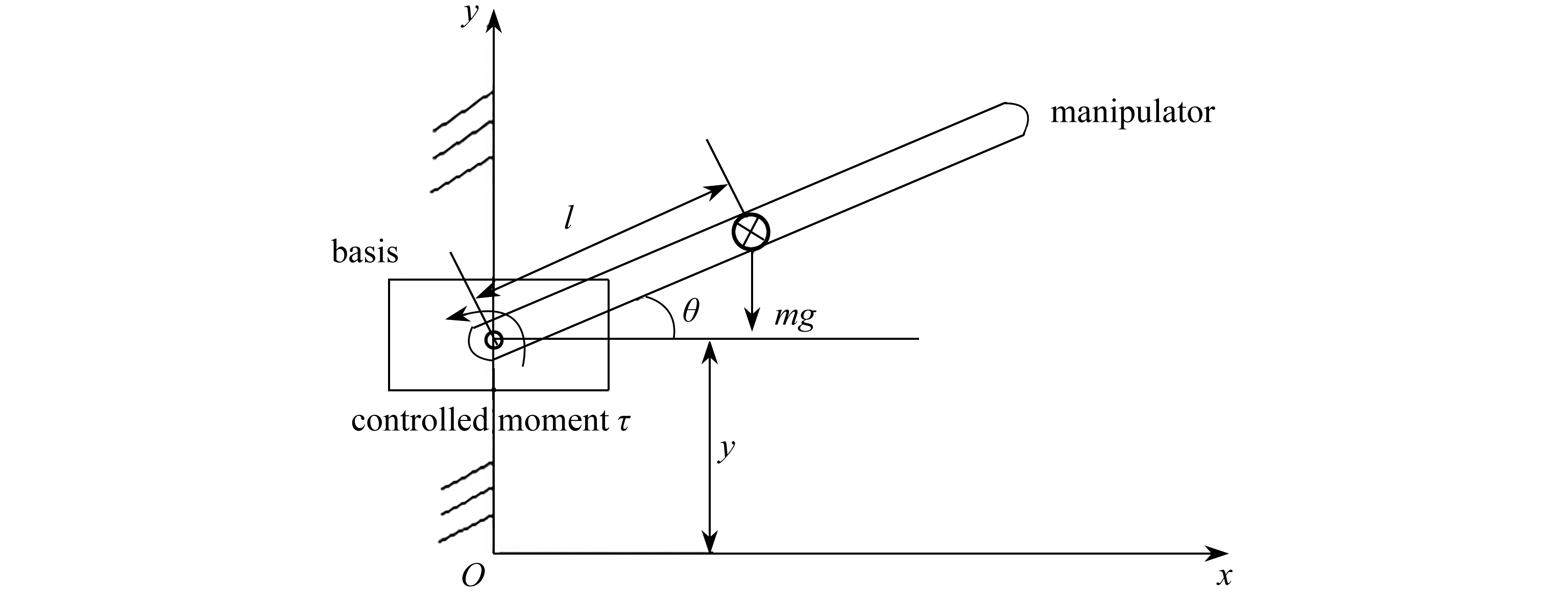
图2 基础振动下的单自由度机械臂示意图
Fig. 2 Schematic diagram of a single freedom manipulator under basic vibration
设质量块运动满足理想几何约束方程,即已知y在区间时间段向上或下做直线运动,幅值是固定的,且其加速度不显含时间变化.则运用约束多体Euler-Lagrange运动方程(2)可得系统单自由度受控动力学方程为
(20)
引进状态向量![]() 则系统的状态空间方程和性能积泛函目标函数为
则系统的状态空间方程和性能积泛函目标函数为
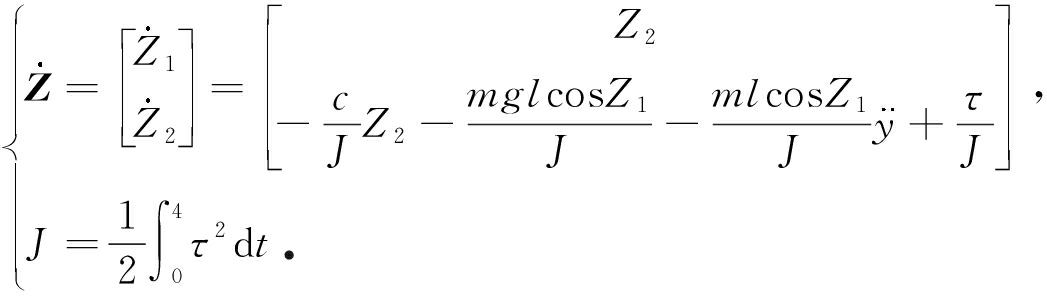
(21)
系统的Hamilton函数为
H0[Z(t),τ(t),λ(t),t]=
(22)
根据式(9),最优控制器设计满足的规范方程应为
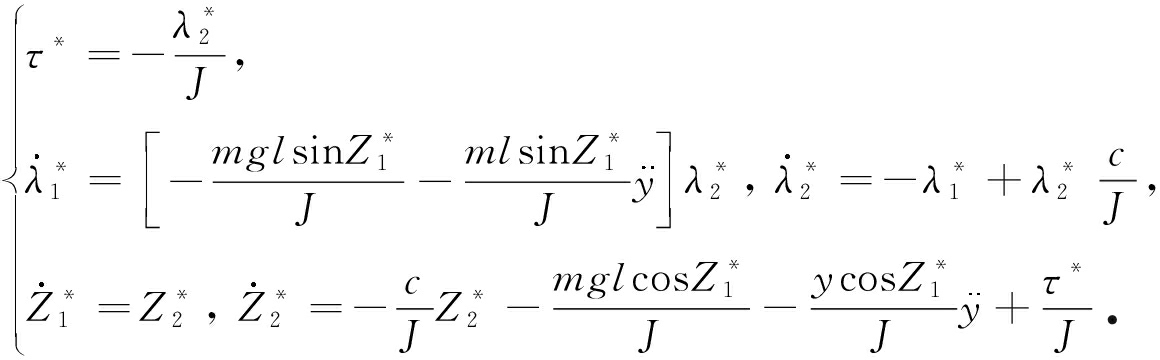
(23)
根据式(14)可知最优控制问题的Noether恒等式为
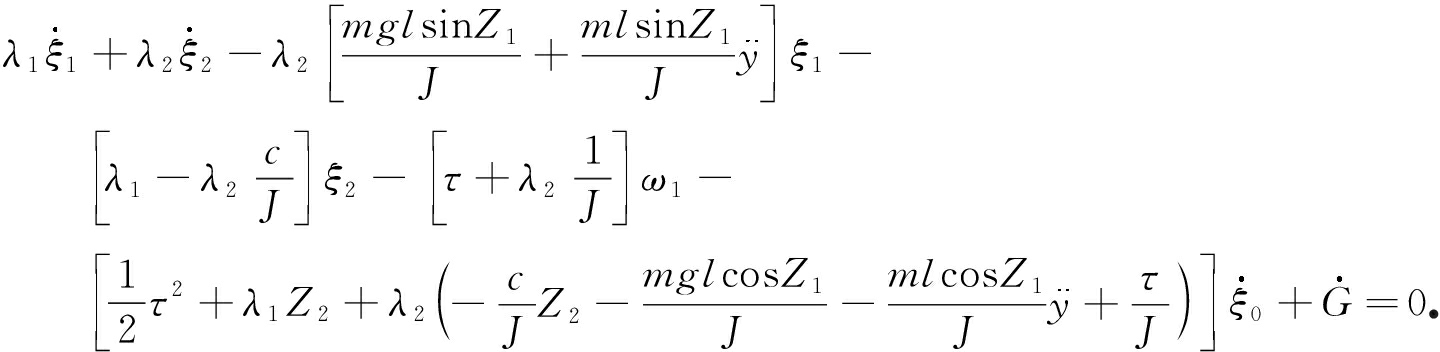
(24)
结合式(24)和(16)得到系统二组简单无限小生成元解为
(25)
将式(25)代入式(18),因此得到最优解守恒律为

(26)
显然,上述结论是正确的,因为在力学自治系统的最优控制问题中,Hamilton函数的一个重要性质就是沿着最优轨线是恒等于常数,即Hamilton函数是最优解的第一积分.而本文用Noether对称性理论成功计算得到,这个方法目前相关文献较少涉及.注意到,本文只是选取了典型的无穷小变换,若根据Noether等式还可以求出其他的独立生成元和规范函数解,则可得到更多组的首次积分.这些第一积分都是最优轨线上系统应满足的方程,结合代数消元法和初始条件,易对最优控制的解析解进行约化和反馈规律τ*=K(Z*(t),t)显式化.
本文建立了受控机械多体系统动力学的状态空间方程模型,通过变分法提出了有约束最优控制问题的最优性条件,提出了最优控制问题的对称性理论,对于机械多体系统动力学的最优控制问题得到了一个完整的计算守恒律方法,这区别于现有的其他方法.应该看到,用现代数学方法和力学中的对称性方法来处理非线性最优控制问题的积分理论,使对机械多体动力学规律与控制系统的设计两大板块有一个更完美和统一的总看法,可以更深刻地理解系统本质运动的内在规律现象.利用本文的研究内容和方法,可以进一步推广到机械多体系统动力学鲁棒最优控制、自适应最优控制、智能优化控制等.
参考文献(References):
[1] 吴洪涛, 熊有伦. 机械工程中的多体系统动力学问题[J]. 中国机械工程, 2000, 11(8): 608-610.(WU Hongtao, XIONG Youlun. The problem of multi-body systems dynamics in mechanical engineering[J]. China Mechanical Engineering, 2000, 11(8): 608-610.(in Chinese))
[2] YUN C, ZONG G H, ZHANG Q X. Study on active control for a flexible beam under the condition of zero gravity[J]. Chinese Journal of Aeronautics, 2000, 13(1): 51-58.
[3] GANG B S, BRIJ N A. Vibration suppression of flexible spacecraft during attitude control[J]. Aeta Aetrnnautina, 2001, 49(2): 73-83.
[4] KIM H K, CHOI S B. Compliant control of a two-link flexible manipulator featuring piezoelectric actuators[J]. Mechanism and Machine Theory, 2001, 36(3): 411-424.
[5] SUN D, MILLS J K. A PZT actuator control of a single-link flexible manipulator based on linear velocity feedback and actuator placement[J]. Mechatronic, 2004, 14(4): 381-401.
[6] 徐小明, 钟万勰. 基于四元数表示的多体动力学系统及其保辛积分算法[J]. 应用数学和力学, 2014, 35(10): 1071-1080.(XU Xiaoming, ZHONG Wanxie. Symplectic integration for multibody dynamics based on quaternion parameters[J]. Applied Mathematics and Mechanics, 2014, 35(10): 1071-1080.(in Chinese))
[7] 董雪仰, 戈新生. 航天器太阳帆板展开过程最优控制的自适应Gauss伪谱法[J]. 应用数学和力学, 2016, 37(6): 655-664.(DONG Xueyang, GE Xinsheng. The adaptive Gauss pseudospectral method for the optimal control of spacecraft solar array deployment[J]. Applied Mathematics and Mechanics, 2016, 37(6): 655-664.(in Chinese))
[8] VASQUES C M A, RODRIGUES J D. Active vibration control of smart piezoelectric beams: comparison of classical and optimal feedback control strategies[J]. Computers and Structures, 2006, 84(22/23): 1402-1414.
[9] CAI G P, LIM C W. Active control of a flexible hub-beam system using optimal tracking control method[J]. International Journal Mechanical Sciences, 2006, 48(10): 1150-1162.
[10] KOBILAROV M. Discrete geometric motion control of autonomous vehicles[D]. PhD Thesis. Los Angeles: University of Southern California, 2008: 12-18.
[11] 张耀欣, 丛爽. 平面二自由度冗余驱动并联机构的最优运动控制及其仿真[J]. 系统仿真学报, 2005, 17(10): 2450-2454.(ZHANG Yaoxin, CONG Shuang. Optimal motion control and simulation of redundantly actuated 2-Dof planar parallel manipulator[J]. Journal of System Simulation, 2005, 17(10): 2450-2454.(in Chinese))
[12] 戈新生, 陈立群, 刘延柱. 一类多体系统的非完整运动规划最优控制[J]. 工程力学, 2006, 23(3): 63-68.(GE Xinsheng, CHEN Liqun, LIU Yanzhu. Optimal control of a nonholonomic motion planning for mutilbody systems[J]. Engineering Mechanics, 2006, 23(3): 63-68.(in Chinese))
[13] LEYENDECKER S, OBER-BLÖBAUM S, MARSDEN J E, et al. Discrete mechanics and optimal control for constrained systems[J]. Optimal Control Applications and Methods, 2010, 31(6): 505-528.
[14] 白龙, 董志峰, 戈新生. 基于李群的水下航体动力学建模及最优控制[J]. 系统仿真学报, 2016, 28(5): 1150-1157.(BAI Long, DONG Zhifeng, GE Xinsheng. Lie group modeling and optimal control of underwater vehicle[J]. Journal of System Simulation, 2016, 28(5): 1150-1157.(in Chinese))
[15] 彭海军, 李飞, 高强. 多体系统轨迹跟踪的瞬时最优控制保辛方法[J]. 力学学报, 2016, 48(4): 784-781.(PENG Haijun, LI Fei, GAO Qiang. Symplectic method for instantaneous optimal control of multibody system trajectory tracking[J]. Acta Mechanica Sinica, 2016, 48(4): 784-781.(in Chinese))
[16] FREDERICO G S F, TORRES D F M. Fractional conservation laws in optimal control theory[J]. Nonlinear Dynamics, 2008, 53(3): 215-222.
[17] HUSSEIN I I, BLOCH A M. Optimal control of underactuated nonholonomic mechanical systems[J]. IEEE Translations on Automatic Control, 2008, 53(3): 668-682.
[18] TORRES D F M. On the Noether theorem for optimal control[J]. European Journal of Control, 2002, 8(1): 56-63.
[19] TORRES D F M. Carathdory equivalence, Noether theorems, and Tonelli full-regularity in the calculus of variations and optimal control[J]. Journal of Mathematical Sciences, 2004, 120(1): 1032-1050.
[20] FABIEN B. Analytical System Dynamics[M]. Berlin: Springer, 2009: 46-53.
ZHENG Mingliang
(School of Mechanical Engineering and Automation, Zhejiang Sci-Tech University, Hangzhou 310018, P.R.China)
Abstract: A Noether-type conservation law for the nonlinear optimal control problems of mechanical multibody system dynamics was proposed based on the group invariance principle. The controlled mechanical multi-rigid-body systems under ideal holonomic constraints were studied, and the dynamic Euler-Lagrange equations were expressed in the form of the state space with the augmented vector method. The state equations, adjoint equations and governing equations for the optimal solution to the optimal control problem were obtained with the variational method. The Noether symmetric infinitesimal transformation with time, state variables, covariate variables and control variables was applied to the system performance index functional, then the conservation laws of the optimal solution equations were obtained, and the optimal solution relation was expressed in the form of a set of algebraic equations, which lays a solid foundation for the integral method and various numerical algorithms of the optimal solution. Finally, an example about the optimal energy control of the nonlinear dynamics of the mechanical arm under the basic vibration was given to illustrate the correctness of the proposed symmetry method.
Key words: multibody system; optimal control; Noether symmetry; conservation law; mechanical arm dynamics
Foundation item: The National Natural Science Foundation of China(11472247)
文章编号:1000-0887(2018)07-0766-09
ⓒ 应用数学和力学编委会,ISSN 1000-0887
*收稿日期: 2017-11-23;
修订日期:2018-01-07
基金项目: 国家自然科学基金(11472247)
作者简介: 郑明亮(1988—),男,博士生(E-mail: zhmlwxcstu@163.com).
中图分类号: TH122;O316
文献标志码:A
DOI: 10.21656/1000-0887.380295
引用本文/Cite this paper:
郑明亮. 机械多体系统动力学非线性最优控制问题的Noether理论[J]. 应用数学和力学, 2018, 39(7): 776-784.
ZHENG Mingliang. The Noether theorem for nonlinear optimal control problems of mechanical multibody system dynamics[J]. Applied Mathematics and Mechanics, 2018, 39(7): 776-784.