曾德强1, 吴开腾1, 宋乾坤2, 张瑞梅3,4, 钟守铭3
(1. 内江师范学院 四川省高等学校数值仿真重点实验室; 四川省数据恢复重点实验室, 四川 内江 641100;2. 重庆交通大学 数学系, 重庆 400074;3. 电子科技大学 数学科学学院, 成都 611731;4. 滑铁卢大学 应用数学系, 加拿大 安大略 滑铁卢 N2L3G1)
摘要: 研究了时滞神经网络随机抽样控制的状态估计问题.首先, 给出了随机抽样区间和抽样输入时滞的统一概率结构.基于此结构, 构造了一个包含新的锯齿结构项的Lyapunov泛函.然后, 运用不等式放缩技术, 得到了误差系统随机稳定的保守性更低的标准,并设计出了合适的状态估计器.最后, 数值仿真算例验证了所得结果的优势和有效性.
关 键 词: 时滞神经网络; 随机抽样; 状态估计; Lyapunov泛函
在过去几十年里, 神经网络已经被广泛应用于图像处理、模式识别、组合优化和保密通信等领域[1-4].在神经网络的应用过程中, 时滞是不可避免的, 且是网络系统产生震荡、不稳定的一个重要原因.因此, 时滞神经网络的研究受到了广泛关注[5-6].此外, 在网络输出过程中, 神经元状态信息是很难能全部得到的, 故在应用中需对神经元状态信息进行估计.近年来, 很多学者研究了时滞神经网络的状态估计问题, 得到了许多有趣的结果[7-12].
随着人工智能的飞速发展, 自动控制被广泛应用到工程实践中.目前, 大量控制方法被用来解决时滞神经网络的状态估计问题, 比如,时滞反馈控制法[13]、自适应控制法[14]和比例导数控制法[15].上述控制方法都要求在连续时间上进行信息反馈.然而, 在实际操作过程中, 控制策略是需要数字反馈的[16].于是, 随着现代计算机和网络通信技术的发展, 数字控制法应运而生,并得到了飞速发展.数字控制法有速度快、控制量小、精度高、花费少的优点[17-19].作为数字控制方法的一种, 抽样控制法亦得到了极大的发展, 并被广泛用于研究时滞神经网络的状态估计问题[17-18,20].
在文献[21]中, 研究了确定抽样区间的时滞神经网络的状态估计问题.然而在实际问题中, 因受到环境和人为随机不确定因素的影响, 抽样区间往往是随机不确定的.在此情况下, 确定抽样区间的抽样控制方法就失效了, 需要考虑随机抽样控制方法.在文献[5]中, 随机抽样控制法被用于研究时滞神经网络的状态估计问题, 但受限于抽样区间和抽样输入时滞不统一的概率结构, 一些能够捕获更多抽样信息的锯齿结构项没有被引入到Lyapunov泛函中.这使得文献[5]中的结果存在一定程度的保守性.
基于上述分析, 本文研究了时滞神经网络的随机抽样控制的状态估计问题, 提出了一种统一的随机抽样的概率框架, 改进了文献[5]的结果.
符号定义 Rn表示n维欧氏空间;Rn×n表示所有的n×n实矩阵的集合.In表示n×n的单位矩阵.0n表示n×n的零矩阵;0n, m表示n×m的零矩阵.上标T表示一个矩阵的转置.对实矩阵X和Y,X>Y表示矩阵X-Y是正定的.diag{·}表示一个对角矩阵.Sym{X}=X+XT.*表示一个矩阵的对称项.P{·}表示概率,E{·}表示数学期望.如果没有进行特别说明, 所有的矩阵在进行代数运算时都是适维的.考虑下列经典时滞神经网络系统:
(1)
其中,x(t)=[x1(t), x2(t), …, xn(t)]T∈Rn是状态变量; p(t)∈Rm是输出子系统;A, B, C∈Rn×n和D∈Rm×n是已知矩阵;τ(t)是时变时滞, 且满足τ(t)≤d和![]() 其中d和μ是常数;J(t)∈Rn是外部输入变量; f(t)=[f1(x1(t)), f2(x2(t)), …, fn(xn(t))]T∈Rn是激励函数, 且满足
其中d和μ是常数;J(t)∈Rn是外部输入变量; f(t)=[f1(x1(t)), f2(x2(t)), …, fn(xn(t))]T∈Rn是激励函数, 且满足
![]() ∀α≠β, i=1,2,…,n,
∀α≠β, i=1,2,…,n,
(2)
其中,![]() 和
和![]() 是常数.
是常数.
为了观察系统(1)的神经元状态, 考虑下列估计系统:
(3)
其中,y(t)是x(t)的估计量,r(t)是外部输出估计量,u(t)是控制输入.
定义误差变量e(t)=x(t)-y(t),由系统(1)和(3)可得下列误差系统:
(4)
其中,g(e(t))=f(x(t))-f(y(t)).由式(2)易知,
g(e(t))=[g1(e1(t)),g2(e2(t)),…,gn(en(t))]T
满足
(5)
本文考虑下列随机抽样控制器:
u(t)=K(p(tk)-r(tk))=KDe(tk), tk≤t<tk+1, k=0,1,2,…,
(6)
其中,K是控制增益矩阵.
随机抽样区间h=tk+1-tk.假设h有l个取值, 分别为h1, h2, …, hl,其概率分别为
P{h=hi}=βi, i=1,2,…,l,
(7)
其中,βi∈[0,1]是已知常数, 且满足![]()
令q(t)=t-tk,由式(7)可得
P{q(t)=qi(t)}=P{0≤q(t)≤hi}=P{h=hi}=βi, i=1,2,…,l,
其中
qi(t)=t-tk, t∈[tk,tk+hi).
下面引入随机变量βi(t)使得
其概率分别为
P{βi(t)=1}=P{h=hi}=βi, i=1,2,…,l.
由于βi(t)服从Bernoulli分布, 故有
E{βi(t)}=βi, E{(βi(t)-βi)2}=βi(1-βi), i=1,2,…,l.
综上可知, 误差系统(4)可重写为下列形式:

(8)
注1 近年来, 随机抽样方法引起了研究者们的极大关注(见文献[5,22-27]).但在上述文献的方法中, 需要将随机抽样区间的取值进行排序, 即0=h0<h1<…<hl,然后计算概率
继而定义随机变量
由此将控制器u(t)=KDe(tk)改写为![]() 其中τi(t)∈[hi-1,hi).注意到在该方法中,
其中τi(t)∈[hi-1,hi).注意到在该方法中,![]() 和q(t)是通过引入不同的随机变量βi(t)和αi(t)来表示的.这导致了随机抽样区间h和抽样输入时滞q(t)具有不统一的概率框架, 使得一些能够充分利用抽样信息的锯齿结构项很难被引入到Lyapunov泛函中.例如: 如果引入锯齿结构项
和q(t)是通过引入不同的随机变量βi(t)和αi(t)来表示的.这导致了随机抽样区间h和抽样输入时滞q(t)具有不统一的概率框架, 使得一些能够充分利用抽样信息的锯齿结构项很难被引入到Lyapunov泛函中.例如: 如果引入锯齿结构项
则该项很难求导处理, 因为βi(t)和αi(t)属于不同的概率分布.而众所周知, 锯齿结构项的引入能有效减少抽样控制估计标准的保守性.基于此, 本文将随机抽样区间h和抽样输入时滞q(t)用同一个随机变量βi(t)表达, 使得锯齿结构项能较容易引入到Lyapunov泛函中.
为得到本文的主要结果, 下面给出如下定义和引理.
定义1[28] 误差系统(8)是随机稳定的, 如果满足
引理1[29] 设Y>0, w(s)是适维变量, 则有
-![]() wT(s)Yw(s)ds≤(t2-t1)ξT(t)MTY-1Mξ(t)+2ξT(t)MT
wT(s)Yw(s)ds≤(t2-t1)ξT(t)MTY-1Mξ(t)+2ξT(t)MT![]() w(s)ds,
w(s)ds,
其中, 矩阵M和变量ξ(t)是与积分变量无关的任意适维量.
在给出主要结果前, 先引入下列符号定义:
![]() i=[0n,(i-1)n In 0n,(6-i)n] (i=1,2,…,l+4),
i=[0n,(i-1)n In 0n,(6-i)n] (i=1,2,…,l+4),
eT(t-ql(t)), gT(e(t-τ(t)))]T.
定理1 在条件(5)下, 对给定的常数μ, βi, hi(i=1,2,…,l)和υ, 误差系统(8)是随机稳定的, 如果对正定矩阵![]() 对称矩阵
对称矩阵![]() 正定对角阵Θ, Δ=diag{δ1,δ2,…,δn}, Λ=diag{λ1,λ2,…,λn},和任意适维矩阵
正定对角阵Θ, Δ=diag{δ1,δ2,…,δn}, Λ=diag{λ1,λ2,…,λn},和任意适维矩阵![]() 使得下列不等式成立:
使得下列不等式成立:
Π(1;q1(t),q2(t),…,ql(t))<0,
(9)
其中,qi(t)∈{0,hi},且
Π(σ;q1(t),q2(t),…,ql(t))=
![]()
![]() l+4+
l+4+
Sym{(![]() 3-K-
3-K-![]() 1)TΔ
1)TΔ![]() 2}+Sym{(K+
2}+Sym{(K+![]() 1-
1-![]() 3)TΛ
3)TΛ![]() 2}+
2}+
![]() i+3+
i+3+

![]() 1-
1-![]() i+3) }-
i+3) }-

![]() i+3-
i+3-

Sym{(υ![]() 1+
1+![]() 2)TF(-
2)TF(-![]() 2-A
2-A![]() 1+B
1+B![]() 3+C
3+C![]() l+4)}-
l+4)}-
![]()
![]() i+3}.
i+3}.
并且控制器的增益矩阵可由下列公式计算:
证明 对误差系统(8), 考虑下列Lyapunov泛函:
(10)
其中
V1(t)=eT(t)Pe(t)+![]() gT(e(s))Qg(e(s))ds,
gT(e(s))Qg(e(s))ds,

定义V(et)的无穷小算子L:
因此, 有
(11)
其中,E{LVk(t)}, k=1,2,3,4计算如下:
(1-μ)gT(e(t-τ(t)))Qg(e(t-τ(t)))},
(12)
(13)

(14)

(15)
对任意适维矩阵Y,由引理1可得

(16)
对任意正定对角阵Θ∈Rn×n,由式(5)可得

(17)
此外, 基于误差系统(8), 对任意适维矩阵F有下列等式成立:

此式等价于
Bg(e(t))+Cg(e(t-τ(t)))]}-
(18)
其中![]()
联合式(12)~(18)可得
E{LV(t)}≤E{ηT(t)Π(1;q1(t),q2(t),…,ql(t))η(t)},
tk≤t<tk+1.
(19)
因此, 由条件(9)可得
E{LV(t)}≤0, tk≤t<tk+1,
(20)
且存在充分小的常数κ>0,使得
E{LV(t)}≤-κE{‖e(t)‖2}, tk≤t<tk+1.
(21)
另一方面, 由随机变量βi(t)定义, 可得

其中
于是有
(22)
(23)
与此同时, 根据定理条件可知Vi(tk)≥0, i=1,2.因此, V(t)满足
V(tk)=V1(tk)+V2(tk)≥0, k=1,2,….
(24)
应用Dynkin公式于式(20), 根据式(22)和(23)有
(25)
(26)
E{V(tk+1)}=
(27)
由式(24)~(27)可推得
E{V(0)}≥E{V(t)}≥0.
(28)
由式(21)和(28)可得
根据定义1, 由上式可知, 误差系统(8)是随机稳定的.证毕.
注2 注意到定理1中项![]() 是非线性的,这导致不等式(9)不是线性矩阵不等式.因此, 控制器不能直接通过软件MATLAB的LMI工具箱求解.但根据Schur补引理[30],不等式(9)能转化为线性矩阵不等式.不失一般性, 在定理1中设l=2,应用Schur补引理于式(9), 可得如下推论.
是非线性的,这导致不等式(9)不是线性矩阵不等式.因此, 控制器不能直接通过软件MATLAB的LMI工具箱求解.但根据Schur补引理[30],不等式(9)能转化为线性矩阵不等式.不失一般性, 在定理1中设l=2,应用Schur补引理于式(9), 可得如下推论.
推论1 在条件(5)下, 对给定的常数μ, βi, hi(i=1,2)和υ,误差系统(8)是随机稳定的, 如果对正定矩阵![]() 对称矩阵
对称矩阵![]() 正定对角阵Θ, Δ=diag{δ1, δ2, …, δn}, Λ=diag{λ1, λ2, …, λn},和任意适维矩阵
正定对角阵Θ, Δ=diag{δ1, δ2, …, δn}, Λ=diag{λ1, λ2, …, λn},和任意适维矩阵![]() 使得下列不等式成立:
使得下列不等式成立:
Π(0;0,0)<0,
(29)
(30)
(31)
(32)
其中,Π(σ;q1(t),q2(t))与定理1中定义相同.并且可得如下控制器增益矩阵:
注3 注意在本文中![]() 和
和![]() 这种统一的概率结构使得两个新的(tk,tk+1)依赖的锯齿结构项V3(t)和V4(t)被引入到Lyapunov泛函(10)中.与文献[5,22-23]的方法相比较, 本文的方法能够更充分利用抽样信息, 从而使得状态估计标准的保守性更低.
这种统一的概率结构使得两个新的(tk,tk+1)依赖的锯齿结构项V3(t)和V4(t)被引入到Lyapunov泛函(10)中.与文献[5,22-23]的方法相比较, 本文的方法能够更充分利用抽样信息, 从而使得状态估计标准的保守性更低.
注4 在文献[5]中, 为保证其构造的Lyapunov泛函的正定性, 要求Lyapunov泛函中的矩阵变量都是正定的.而在定理1中, Lyapunov泛函公式(10)并不要求其每一个变量矩阵是正定的.因此, 与文献[5]方法相比较, 本文方法得到的结果条件更松弛.
例1 考虑闭环系统(8), 其参数被给如下[5]:
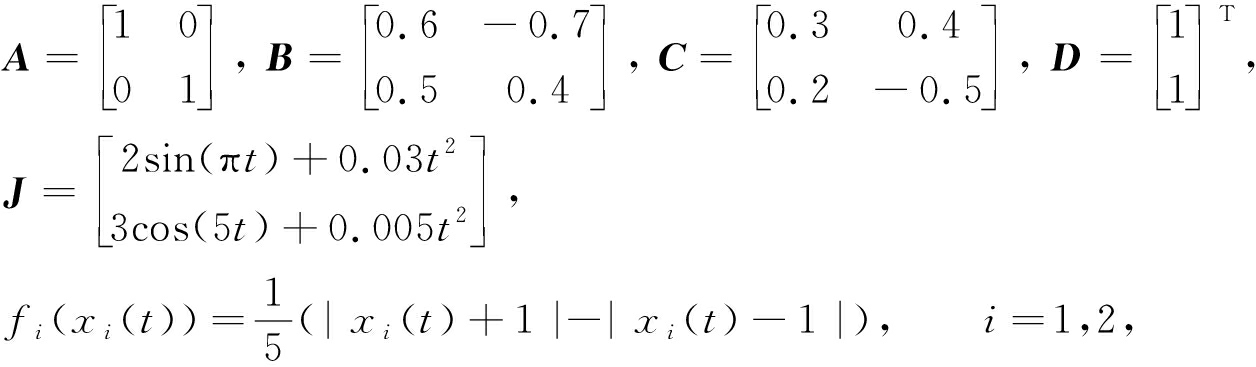
τ(t)=0.92sin t+1.
由上式易知,K-=diag{-0.4,-0.4}, K+=diag{0.4,0.4}, μ=0.92.
不失一般性,假设随机抽样区间h服从两点分布,即P{h=h1}=β, P{h=h2}=1-β.基于推论1,表1和表2给出了在不同情形下本文与文献[5]结果的比较.从表中不难发现,在两种情形下, 本文得到的h2最大值都比文献[5]要大.众所周知, 在抽样控制中, 更大的抽样区间导致更低的控制成本.因此, 本文的方法比文献[5]的方法更有优势, 这也验证了注3和注4的论述.
表1 h2最大值在不同h1取值下的比较(β=0.6)
Table 1 Comparison of the maximum values of h2 for different values of h1(β=0.6)

表2 h2最大值在不同β取值下 的比较(h1=0.5)
Table 2 Comparison of the maximum values of h2 for different values of β(h1=0.5)

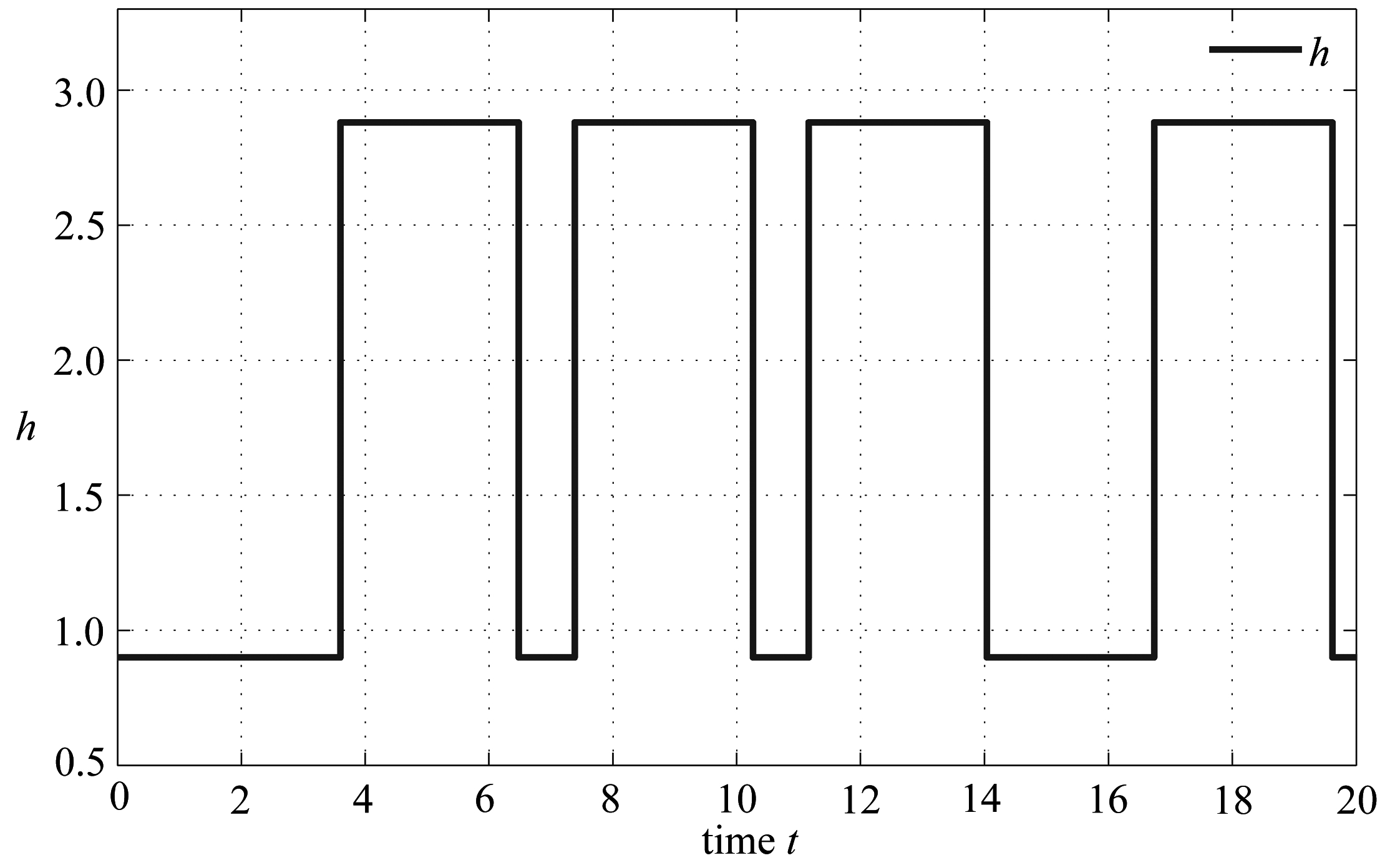
图1 随机抽样区间h(β=0.6)
Fig. 1 The stochastic sampling interval h for β=0.6
取h1=0.9, h2=2.88, β=0.6, υ=1, 初值x(0)=(10,-7), y(0)=(-10,12).用MATLAB 软件的LMI工具箱求解推论1中线性矩阵不等式, 得到下列控制增益矩阵:
图1给出了随机抽样区间h的时间响应取值图;图2给出了在上述控制增益条件下状态变量x(t)与其估计量y(t)的时间响应轨迹;图3给出了随机抽样控制u(t)的输入轨迹.从图2可以发现, 估计量y(t)的轨迹最后与神经元状态变量x(t)的轨迹重合.这验证了本文方法的有效性.
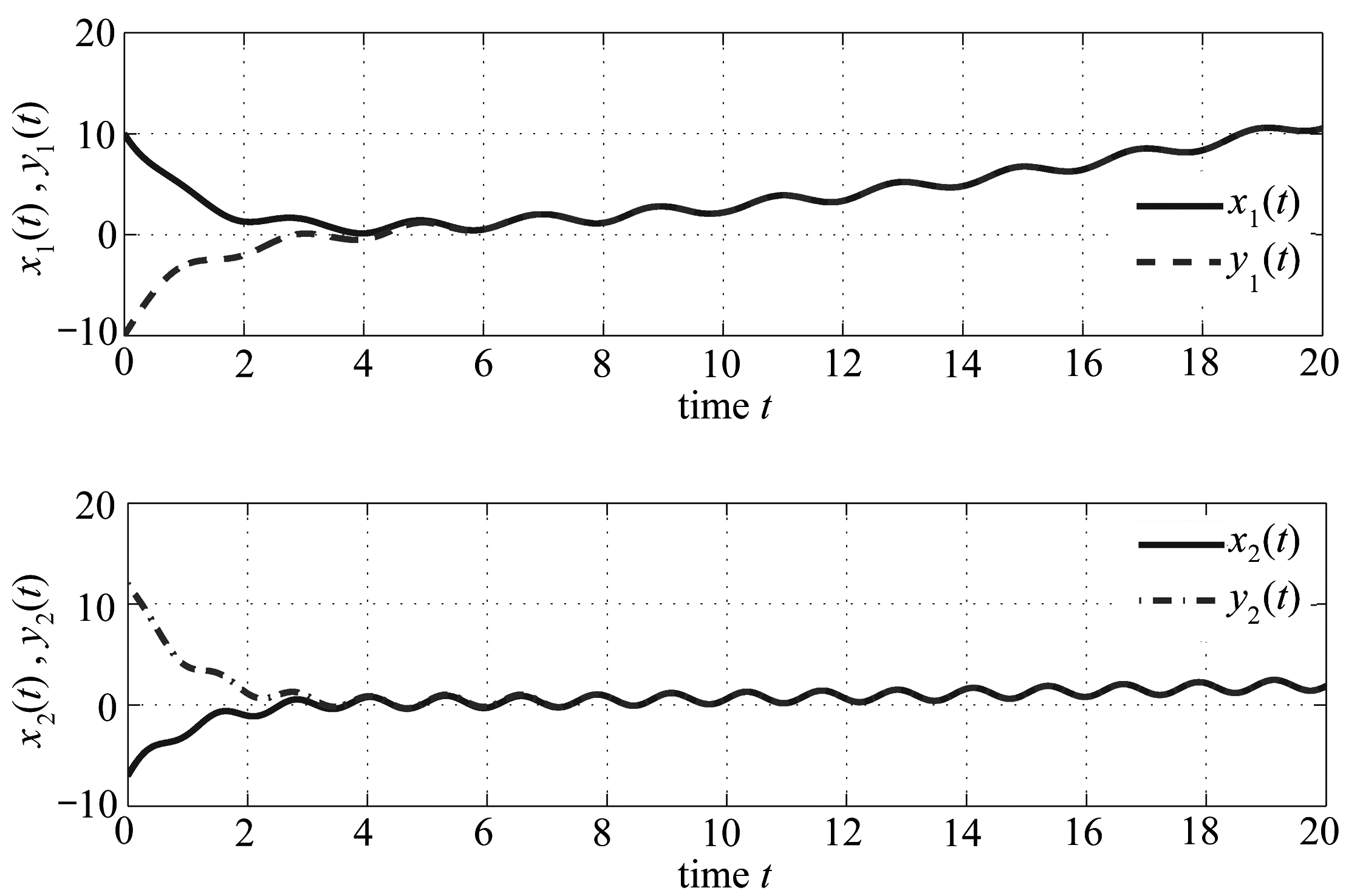
图2 在控制输入u(t)下的x(t)和其估计量y(t)的时间响应轨迹
Fig. 2 State trajectories of x(t) and its estimate y(t) with u(t)

图3 控制输入u(t)的轨迹
Fig. 3 The trajectories of control input u(t)
本文研究了时滞神经网络随机抽样控制的状态估计问题.一种改进的随机抽样处理方法被提出.根据该方法, 构造了一个新的Lyapunov泛函.基于这个 Lyapunov 泛函和运用一些不等式放缩技术, 得到了状态估计的新标准, 并设计出了合适的状态估计器.和存在的结果相比较, 本文所得的结果保守性更低.数值仿真算例验证了所得结果的优势和有效性.
参考文献(References):
[1] ZENG D Q, ZHANG R M, ZHONG S M, et al. Sampled-data synchronization control for Markovian delayed complex dynamical networks via a novel convex optimization method[J]. Neurocomputing, 2017, 266: 606-618.
[2] 王利敏, 宋乾坤, 赵振江. 基于忆阻的分数阶时滞复值神经网络的全局渐进稳定性[J]. 应用数学和力学, 2017, 38(3): 333-346.(WANG Limin, SONG Qiankun, ZHAO Zhenjiang. Global asymptotic stability of memristor-based fractional-order complex-valued neural networks with time delays[J]. Applied Mathematics and Mechanics, 2017, 38(3): 333-346.(in Chinese))
[3] 舒含奇, 宋乾坤. 带有时滞的Clifford值神经网络的全局指数稳定性[J]. 应用数学和力学, 2017, 38(5): 513-525.(SHU Hanqi, SONG Qiankun. Global stability of Clifford-valued recurrent neural networks with mixed time-varying delays[J]. Applied Mathematics and Mechanics, 2017, 38(5): 513-525.(in Chinese))
[4] ZHANG R M, ZENG D Q, ZHONG S M. Novel master-slave synchronization criteria of chaotic Lur’e systems with time delays using sampled-data control[J]. Journal of The Franklin Institute, 2017, 354(12): 4930-4954.
[5] LEE T, PARK J H, KWON O M, et al. Stochastic sampled-data control for state estimation of time-varying delayed neural networks[J]. Neural Networks, 2013, 46(5): 99-108.
[6] ZENG D Q, ZHANG R M, ZHONG S M, et al. Novel Lebesgue-integral-based approach to improved results for neural networks with additive time-varying delay components[J]. Journal of The Franklin Institute, 2017, 354(16): 7543-7565.
[7] SHI K B, LIU X Z, TANG Y Y, et al. Some novel approaches on state estimation of delayed neural networks[J]. Information Sciences, 2016, 372: 313-331.
[8] RATNAVELU K, MANIKANDAN M, BALASUBRAMANIAM P. Design of state estimator for BAM fuzzy cellular neural networks with leakage and unbounded distributed delays[J]. Information Sciences, 2017, 397: 91-109.
[9] ALI M S, SARAVANAN S, ARIK S. Finite-time H∞ state estimation for switched neural networks with time-varying delays[J]. Neurocomputing, 2016, 207: 580-589.
[10] LIU Y C, WANG T, CHEN M S, et al. Dissipativity-based state estimation of delayed static neural networks[J]. Neurocomputing, 2017, 247: 137-143.
[11] XIAO J Y, LI Y T, ZHONG S M, et al. Extended dissipative state estimation for memristive neural networks with time-varying delay[J]. ISA Transactions, 2016, 64: 113-128.
[12] WANG Z S, WANG J D, WU Y M. State estimation for recurrent neural networks with unknown delays: a robust analysis approach[J]. Neurocomputing, 2017, 227: 29-36.
[13] ZHONG M Y, HAN Q L. Fault-tolerant master-slave synchronization for Lur’e systems using time-delay feedback control[J]. IEEE Transactions on Circuits and Systems, 2009, 56(7): 1391-1404.
[14] LU J Q, CAO J D, HO D W C. Adaptive stabilization and synchronization for chaotic Lur’e systems with time-varying delay[J]. IEEE Transactions on Circuits and Systems, 2008, 55(5): 1347-1356.
[15] LIU Y J, LEE S M. Synchronization criteria of chaotic Lur’e systems with delayed feedback PD control[J]. Neurocomputing, 2016, 189(37): 66-71.
[16] LIU Y J, GUO B Z, PARK J H, et al. Nonfragile exponential synchronization of delayed complex dynamical networks with memory sampled-data control[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(1): 118-128.
[17] LI Q, SHEN B, WANG Z D, et al. A sampled-data approach to distributed H∞ resilient state estimation for a class of nonlinear time-delay systems over sensor networks[J]. Journal of The Franklin Institute, 2017, 354(15): 7139-7157.
[18] RAKKIYAPPAN R, SAKTHIVEL N, PARK J H, et al. Sampled-data state estimation for Markovian jumping fuzzy cellular neural networks with mode-dependent probabilistic time-varying delays[J]. Applied Mathematics and Computation, 2013, 221(9): 741-769.
[19] ZHANG R M, ZENG D Q, ZHONG S M, et al. Event-triggered sampling control for stability and stabilization of memristive neural networks with communication delays[J]. Applied Mathematics and Computation, 2017, 310: 57-74.
[20] ANBUVITHYA R, MATHIYALAGAN K, SAKTHIVEL R, et al. Sampled-data state estimation for genetic regulatory networks with time-varying delays[J]. Neurocomputing, 2015, 151: 737-744.
[21] ALI M S, GUNASEKARAN N, ZHU Q. State estimation of T-S fuzzy delayed neural networks with Markovian jumping parameters using sampled-data control[J]. Fuzzy Sets & Systems, 2017, 306: 87-104.
[22] LIU Y J, LEE S M. Sampled-data synchronization of chaotic Lur’e systems with stochastic sampling[J]. Circuits, Systems, and Signal Processing, 2015, 34(12): 3725-3739.
[23] SHI K B, LIU X Z, ZHU H, et al. On designing stochastic sampled-data controller for master-slave synchronization of chaotic Lur’e system via a noel integral inequality[J]. Communications in Nonlinear Science and Numerical Simulation, 2016, 34: 165-184.
[24] GAO H, WU J, SHI P. Robust sampled-data H∞ control with stochastic sampling[J]. Automatica, 2009, 45(7): 1729-1736.
[25] SHEN B, WANG Z D, LIU X H. Sampled-data synchronization control of dynamical networks with stochastic sampling[J]. IEEE Transactions on Automatic Control, 2012, 57(10): 2644-2650.
[26] RAKKIYAPPAN R, DHARANI S, ZHU Q X. Synchronization of reaction-diffusion neural networks with time-varying delays via stochastic sampled-data controller[J]. Nonlinear Dynamics, 2015, 79(1): 485-500.
[27] LEE T H, PARK J H, LEE S M, et al. Robust synchronization of chaotic systems with randomly occurring uncertainties via stochastic sampled-data control[J]. International Journal of Control, 2013, 86(1): 107-119.
[28] WU Z G, SHI P, SU H, et al. Stochastic synchronization of Markovian jump neural networks with time-varying delay using sampled data[J]. IEEE Transactions on Cybernetics, 2013, 43(6): 1796-1806.
[29] YANG F S, ZHANG H G, WANG Y C. An enhanced input-delay approach to sampled-data stabilization of T-S fuzzy systems via mixed convex combination[J]. Nonlinear Dynamics, 2014, 75(3): 501-512.
[30] BOYD S, GHAOUI L E, FERON E, et al. Linear Matrix Inequalities in System and Control Theory[M]. USA: Society for Industrial and Applied Mathematics, 1994.
ZENG Deqiang1, WU Kaiteng1, SONG Qiankun2,ZHANG Ruimei3,4, ZHONG Shouming3
(1. Data Recovery Key Laboratory of Sichuan Province, and Numerical Simulation Key Laboratory of Sichuan Province, Neijiang Normal University, Neijiang, Sichuan 641100, P.R.China;2. Department of Mathematics, Chongqing Jiaotong University, Chongqing 400074, P.R.China;3. School of Mathematical Sciences, University of Electronic Science and Technology of China, Chengdu 611731, P.R.China;4. Department of Applied Mathematics, University of Waterloo, Waterloo, Ontario N2L3G1, Canada) (Contributed by SONG Qiankun, M. AMM Editorial Board)
Abstract: The problem of the state estimation for delayed neural networks with stochastic sampled-data control was studied. First, a unified probability framework involving the stochastic sampling interval and the sampling input delay was proposed. Second, based on this unified probability framework, a new Lyapunov-Krasovskii functional (LKF) with some new terms was constructed. Third, with this LKF and some inequality technologies, a less conservative criterion was established, which can ensure the stochastic stability of the error system. The desired state estimator was designed. Finally, numerical simulation results show the effectiveness and advantages of the proposed method.
Key words: delayed neural network; stochastic sampling; state estimation; Lyapunov-Krasovskii functional
Foundation item: The National Natural Science Foundation of China(61773004)
文章编号:1000-0887(2018)07-0821-12
ⓒ 应用数学和力学编委会,ISSN 1000-0887
*收稿日期: 2017-10-31;
修订日期:2017-11-02
基金项目: 国家自然科学基金(61773004);重庆市高校创新团队项目(CXTDX201601022)
作者简介: 曾德强(1979—), 男, 副教授(E-mail: zengdq22@163.com);吴开腾(1964—), 男, 教授, 博士(E-mail: wukaiteng@263.net);宋乾坤(1963—), 男, 教授, 博士(通讯作者. E-mail: qiankunsong@163.com);张瑞梅(1988—), 女, 博士(E-mail: ruimeizhang163@163.com);钟守铭(1955—), 男, 教授(E-mail: zhongsm@uestc.edu.cn).
(我刊编委宋乾坤来稿)
中图分类号: O175.13
文献标志码:A
DOI: 10.21656/1000-0887.380273
引用本文/Cite this paper:
曾德强, 吴开腾, 宋乾坤, 张瑞梅, 钟守铭. 时滞神经网络随机抽样控制的状态估计[J]. 应用数学和力学, 2018, 39(7): 821-832.
ZENG Deqiang, WU Kaiteng, SONG Qiankun, ZHANG Ruimei, ZHONG Shouming. State estimation for delayed neural networks with stochastic sampled-data control[J]. Applied Mathematics and Mechanics, 2018, 39(7): 821-832.