

Dynamic Modeling and Tracking Control of 2-Joint Manipulators in Ocean Current Environment
-
摘要: 水下机械臂的水动力性能受海流载荷的影响较大,目前针对水下机械臂控制的相关研究中将水下环境做了静水的假设或将海流载荷仅仅作为一种简单的随机扰动来考虑,控制精度较低.该文分别基于Lagrange法和Newton-Euler法推导出均匀海流环境下二关节机械臂的动力学模型,考虑海流和机械臂的相对运动,引入Morison公式计算海流对机械臂的水阻力和惯性力.基于此动力学模型,利用滑模控制策略实现机械臂理想轨迹的精确跟踪.对比PD(proportional-derivative)控制,仿真结果表明滑模控制具有更优的控制效果.Abstract: The hydrodynamic performance of the underwater manipulator is greatly influenced by the current load. The underwater environment is assumed to be a still water environment and the current load is only considered as a simple random disturbance in the current control research, and the traditional control precision is usually rather low. Based on the Lagrange method and the Newton-Euler method, a dynamic model for 2-joint manipulators in the uniform ocean current environment was derived. In view of the relative motion of the ocean current and the manipulator, the Morison formula was introduced to calculate the water resistance and the inertia force of the ocean current on the manipulator. Based on this dynamic model, the sliding mode control strategy was used to achieve accurate tracking of the ideal trajectory of the manipulator. The simulation results show that, compared with the PD (proportional derivative) control, the sliding mode control strategy has better control effects.
-
Key words:
- ocean current environment /
- underwater manipulator /
- dynamic modeling /
- trajectory tracking /
- sliding mode control
edited-byedited-by1) (我刊编委刘焕文推荐) -

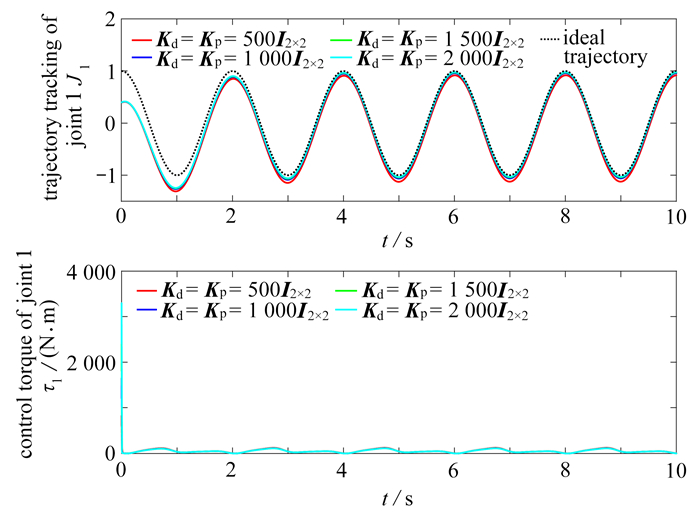
图 2 二关节机械臂PD控制不同控制参数下轨迹跟踪与输入力矩
注 为了解释图中的颜色,读者可以参考本文的电子网页版本,后同.
Figure 2. Trajectory trackings and input torques of the 2-joint manipulator under different control parameters of the PD control

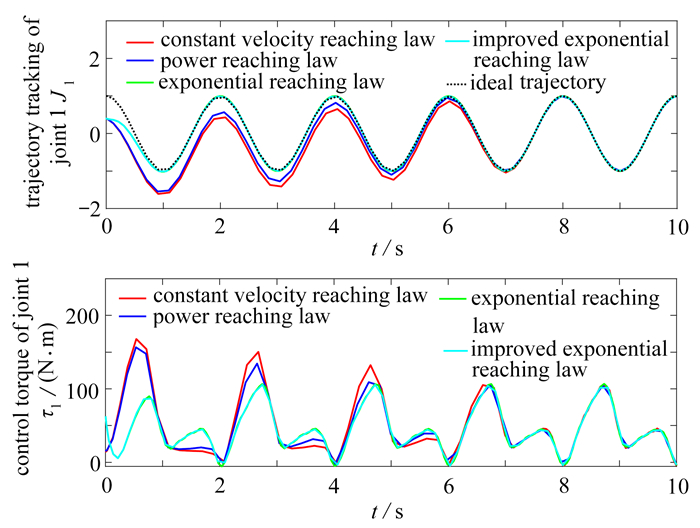
图 3 4种趋近律下二关节机械臂滑模控制轨迹跟踪与输入力矩
Figure 3. Trajectory trackings and input torques of the 2-joint manipulator under 4 reaching laws of the sliding mode control

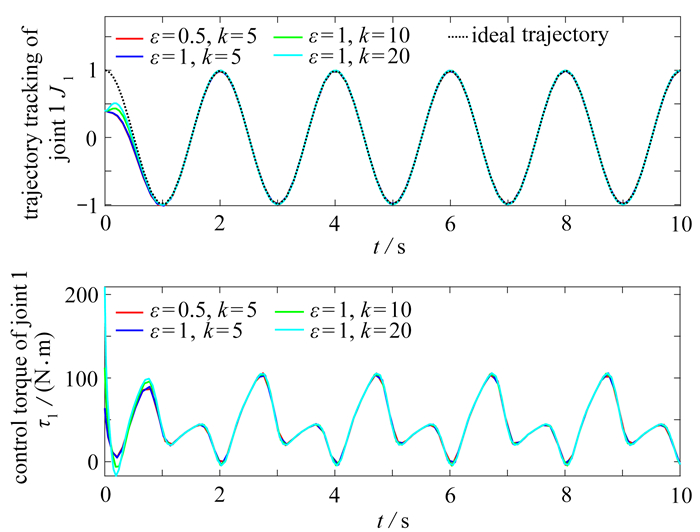
图 4 改进指数趋近律在不同控制参数下的二关节机械臂滑模控制轨迹跟踪与输入力矩
Figure 4. Trajectory trackings and input torques of the 2-joint manipulator under different control parameters of the improved exponential reaching law of the sliding mode control

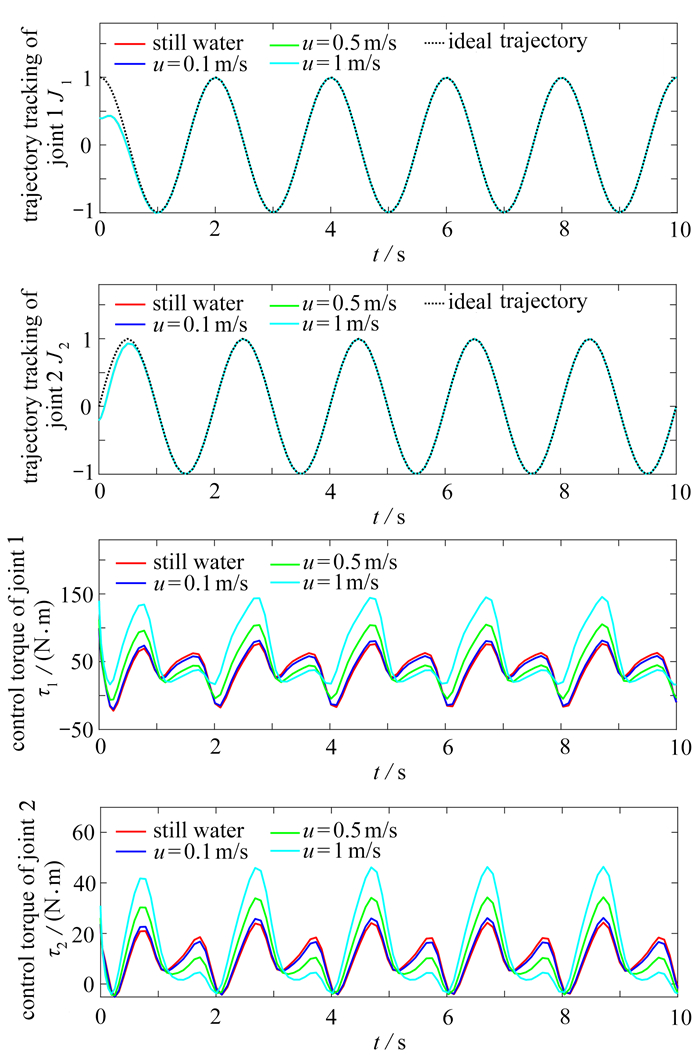
图 5 静水、不同流速均匀海流下二关节机械臂滑模控制轨迹跟踪与输入力矩
Figure 5. Trajectory trackings and input torques of the 2-joint manipulator under still water and uniform ocean currents with different velocities of the sliding mode control
-
[1] 蔡自兴. 机器人学[M]. 北京: 清华大学出版社, 2015: 1-18.CAI Zixing. Robotics[M]. Beijing: Tsinghua University Press, 2015: 1-18. (in Chinese) [2] SIVČEV S, COLEMAN J, DOOLY G, et al. Underwater manipulator: a review[J]. Ocean Engineering, 2018, 163: 431-450. doi: 10.1016/j.oceaneng.2018.06.018 [3] PARRA-VEGA V, RODRIGUEZ-ANGELES A, ARIMOTO S, et al. Highprecision constrained grasping with cooperative adaptive handcontrol[J]. Journal of Intelligent and Robotic Systems, 2001, 32(3): 235-254. doi: 10.1023/A:1013987209547 [4] FLIXEDER S, GLUCK T, KUGI A. Force-basedcooperative handling and lay-up of deformable materials: mechatronic design, modeling, and control of a demonstrator[J]. Mechatronics, 2017, 47: 246-261. doi: 10.1016/j.mechatronics.2016.10.003 [5] 韩江, 汪鹏, 董方方, 等. 基于Udwadia-Kalaba方法的平面冗余并联机器人建模与轨迹跟踪控制[J]. 应用数学和力学, 2020, 41(11): 1183-1196. doi: 10.21656/1000-0887.400363HAN Jiang, WANG Peng, DONG Fangfang, et al. Modeling and control of planar redundant parallel robots based on the Udwadia-Kalaba method[J]. Applied Mathematics and Mechanics, 2020, 41(11): 1183-1196. (in Chinese) doi: 10.21656/1000-0887.400363 [6] PAUL B. Analytical dynamics of mechanisms: a computer oriented overview[J]. Mechanism and Machine Theory, 1975, 10(6): 481-507. doi: 10.1016/0094-114X(75)90005-1 [7] SHABANA A A. Dynamics of Multibody Systems[M]. Berlin: Springer-Verlag, 2005: 76-93. [8] FUHRER C, SCHWERTASSEK R. Generation and solution of multibody system equations[J]. International Journal of Non-Linear Mechanics, 1990, 25(2/3): 127-141. [9] 董方方, 喻斌, 赵晓敏, 等. 双移动机械臂空间协作动力学建模研究[J]. 应用数学和力学, 2022, 43(8): 846-856. doi: 10.21656/1000-0887.420223DONG Fangfang, YU Bin, ZHAO Xiaomin, et al. Dynamic modeling of spatial cooperation between dual-arm mobile manipulators[J]. Applied Mathematics and Mechanics, 2022, 43(8): 846-856. (in Chinese) doi: 10.21656/1000-0887.420223 [10] 韩江, 汪鹏, 董方方, 等. 基于Udwadia-Kalaba方法的并联机器人鲁棒伺服约束控制[J]. 应用数学和力学, 2021, 42(3): 264-274. doi: 10.21656/1000-0887.410197HAN Jiang, WANG Peng, DONG Fangfang, et al. Robust servo constrained control of parallel robots based on the Udwadia-Kalaba method[J]. Applied Mathematics and Mechanics, 2021, 42(3): 264-274. (in Chinese) doi: 10.21656/1000-0887.410197 [11] 宁会峰, 鄢志彬, 程荣展, 等. 光伏组件清扫机械臂动力学建模与分析[J]. 太阳能学报, 2020, 41(12): 138-145. https://www.cnki.com.cn/Article/CJFDTOTAL-TYLX202012020.htmNING Huifeng, YAN Zhibing, CHENG Rongzhan, et al. Dynamic modeling and analysis of photovoltaic module cleaning manipulator[J]. Acta Energiae Solaris Sinica, 2020, 41(12): 138-145. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TYLX202012020.htm [12] SCIAVICCO L, SICILIANO B. Modelling and Control of Robot Manipulators[M]. Berlin: Springer Science & Business Media, 2012: 65-87. [13] ZHONG Y G, YANG F. Dynamic modeling and adaptive fuzzy sliding mode control for multi-link underwater manipulators[J]. Ocean Engineering, 2019, 187: 106202. doi: 10.1016/j.oceaneng.2019.106202 [14] 赵伟, 张晓晖, 杨松楠. 基于动力学模型分块逼近的水下机械臂RBF滑模控制算法研究[J]. 西安理工大学学报, 2021, 37(4): 555-561. https://www.cnki.com.cn/Article/CJFDTOTAL-XALD202104013.htmZHAO Wei, ZHANG Xiaohui, YANG Songnan. Research on RBF sliding mode control algorithm for underwater manipulator based on partitional approximation of dynamic mode[J]. Journal of Xi'an University of Technology, 2021, 37(4): 555-561. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XALD202104013.htm [15] 孙国法, 赵尔全, 张国巨, 等. 基于扰动观测器补偿的机械臂非奇异快速终端滑模控制[J]. 控制理论与应用, 2022, 39(8): 1506-1515. https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY202208018.htmSUN Guofa, ZHAO Erquan, ZHANG Guoju. Non-singular fast terminal sliding mode control of manipulator based on disturbance observe compensation[J]. Control Theory & Applications, 2022, 39(8): 1506-1515. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY202208018.htm [16] 刘金琨, 孙富春. 滑模变结构控制理论及其算法研究与进展[J]. 控制理论与应用, 2007, 24(3): 407-418. https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200703014.htmLIU Jinkun, SUN Fuchun. Research and development on theory and algorithms of sliding mode control[J]. Control Theory & Applications, 2007, 24(3): 407-418. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200703014.htm [17] HAN Y, CHENG Y, XU G. Trajectory tracking control of AGV basedon sliding mode control with the improved reaching law[J]. IEEE Access, 2019, 7: 20748-20755. [18] PAN J, LI W, ZHANG H. Controlalgorithms of magnetic suspension system based on the improved double exponential reaching law of sliding mode control[J]. International Journal of Control, Automation and Systems, 2018, 16(6): 2878-2887. [19] WANG L, LIU S, JIANG S, et al. A sliding mode control method based on improved reaching law for superbuck converter in photovoltaic system[J]. Energy Reports, 2022, 8: 574-585. [20] SUN X, CAO J, LEI G, et al. A composite sliding mode control for SPMSM drives based on a new hybrid reaching law with disturbance compensation[J]. IEEE Transactions on Transportation Electrification, 2021, 7(3): 1427-1436. [21] 刘冬雨, 刘宏, 李志奇. 空间机械臂手系统在轨精细维修操作的标定策略[J]. 宇航学报, 2017, 38(6): 630-637. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201706010.htmLIU Dongyu, LIU Hong, LI Zhiqi. Calibration strategy of space manipulator system on-orbit servicing fine operation[J]. Journal of Astronautics, 2017, 38(6): 630-637. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201706010.htm [22] 张子扬. 基于深度强化学习的水下机械臂抓取研究[D]. 硕士学位论文. 合肥: 中国科学技术大学, 2020: 1-15.ZHANG Ziyang. Research on grasping control of underwater manipulator based on deep reinforcement[D]. Master Thesis. Hefei: University of Science and Technology of China, 2020: 1-15. (in Chinese) [23] 罗宛京. 空间钢结构复杂相贯线机器人切割关键技术研究[D]. 硕士学位论文. 天津: 天津大学, 2012: 1-12.LUO Wanjing. Study on key technology of complicated intersecting lines in spatial steel structure by sutting robot[D]. Master Thesis. Tianjin: Tianjin University, 2012: 1-12. (in Chinese) [24] MAZZEO A, AGUZZI J, CALISTI M, et al. Marinerobotics for deep-sea specimen collection: a systematic review of underwater grippers[J]. Sensors, 2022, 22(2): 648. [25] FALTINSEN O M. 船舶与海洋工程环境载荷[M]. 2版. 上海: 上海交通大学出版社, 2013: 169-191.FALTINSEN O M. Environmental Loads for Ships and Ocean Engineering[M]. 2nd ed. Shanghai: Shanghai Jiao Tong University Press, 2013: 169-191. (in Chinese) [26] 刘金琨. 机器人控制系统的设计与MATLAB仿真[M]. 北京: 清华大学出版社, 2016: 170-220.LIU Jinkun. Robot Control System Design and MATLAB Simulation[M]. Beijing: Tsinghua University Press, 2016: 170-220. (in Chinese) [27] 高阳, 张晓晖, 高玉儿, 等. 基于神经网络和模糊补偿的水下机械臂控制[J]. 计算机工程与应用, 2022, 58(15): 317-323. https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG202215032.htmGAO Yang, ZHANG Xiaohui, GAO Yuer, et al. Control of underwater manipulator based on neural network and fuzzy compensation[J]. Computer Engineering and Applications, 2022, 58(15): 317-323. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG202215032.htm [28] 董永飞. 水下机械臂动力学分析与轨迹跟踪滑模控制[D]. 硕士学位论文. 大连: 大连理工大学, 2018: 26-41.DONG Yongfei. Dynamic analysis and sliding mode control for trajectory tracking of underwater manipulator[D]. Master Thesis. Dalian: Dalian University of Technology, 2018: 26-41. (in Chinese) -

 下载:
下载:
计量
- 文章访问数: 469
- HTML全文浏览量: 392
- PDF下载量: 64
- 被引次数: 0

 渝公网安备50010802005915号
渝公网安备50010802005915号