| Citation: | GONG Chikun, RU Qingyang, YUAN Lipeng. Adaptive Constrained Control of Unknown Strict Feedback Nonlinear Systems With Dead Zone Input[J]. Applied Mathematics and Mechanics, 2022, 43(12): 1402-1411. doi: 10.21656/1000-0887.430081

|
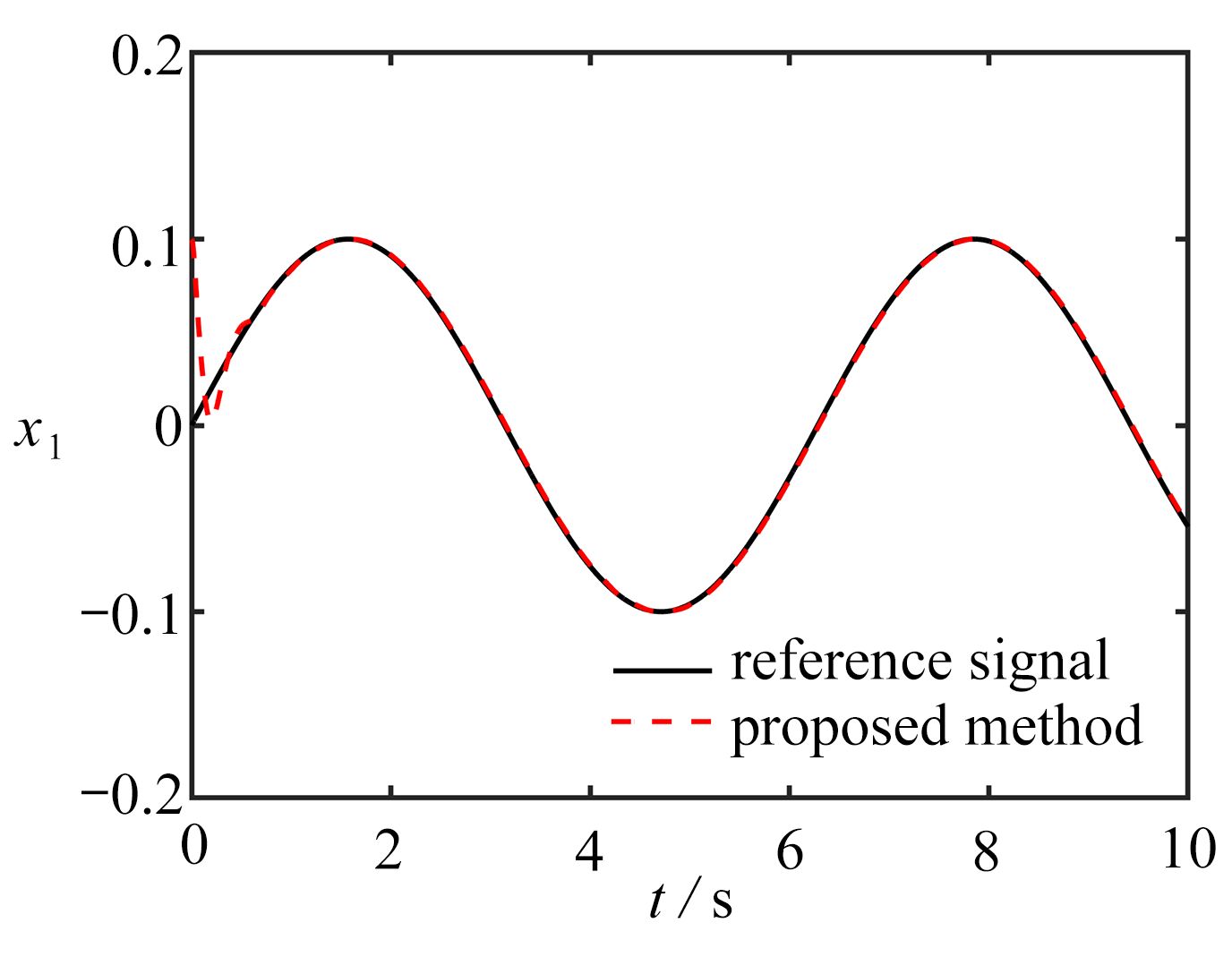
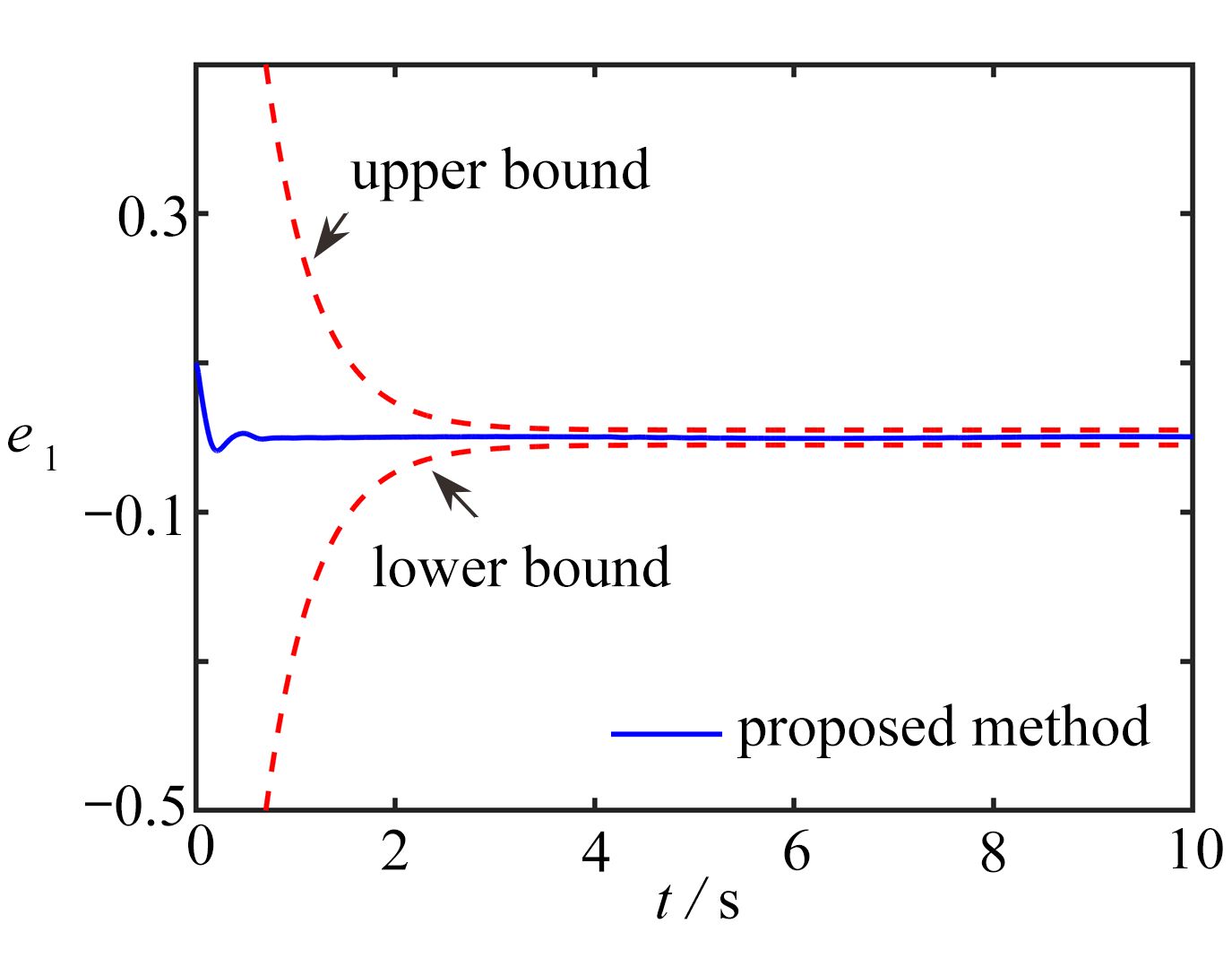
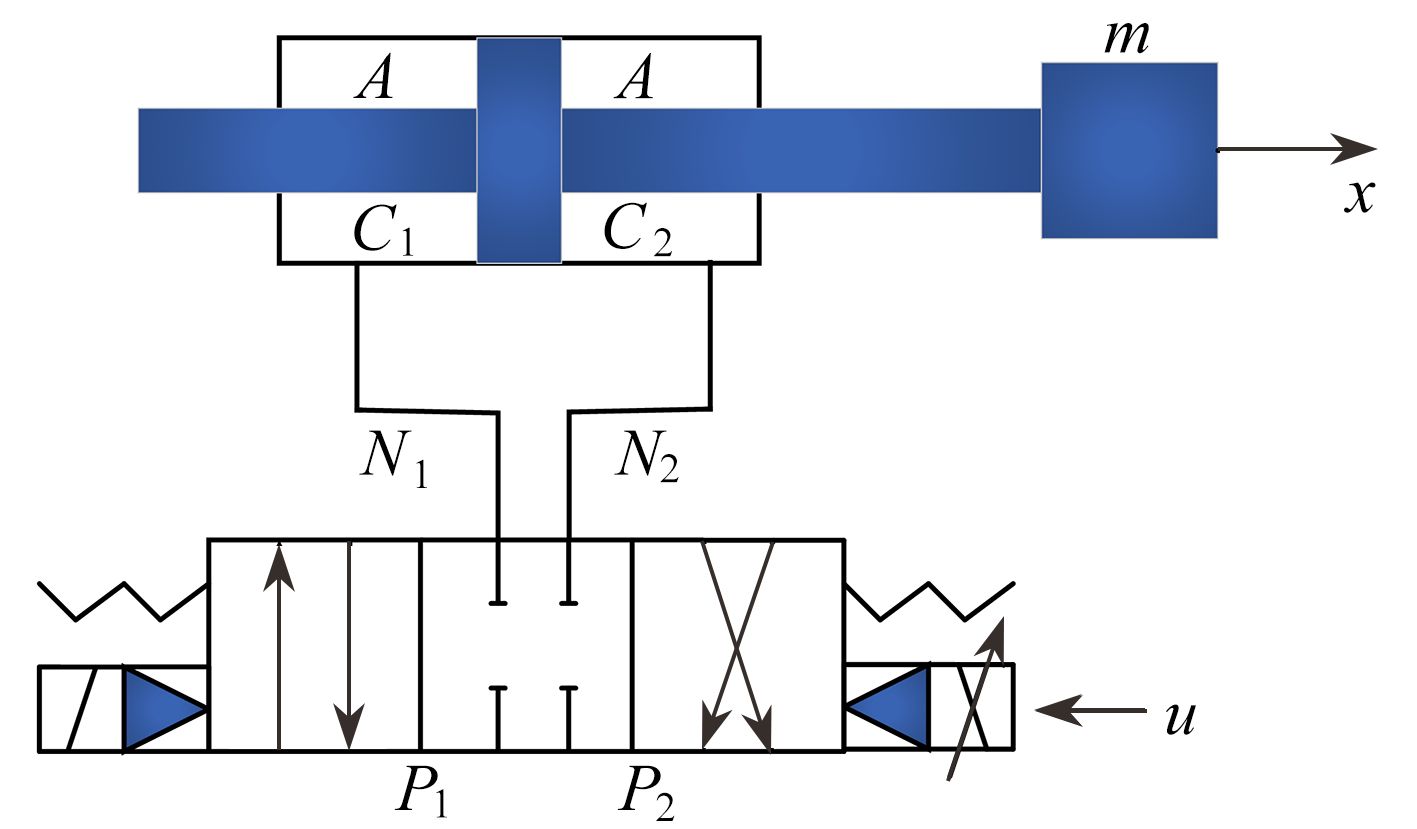
To tackle the problem of unknown strict feedback nonlinear control systems with dead zone input and pre-assigned tracking control, a novel adaptive tracking control strategy was proposed based on the immune function, the active disturbance rejection control and the pre-assigned funnel constraint. The immune function and the extended state observer were utilized to estimate the unknown information of the control system. Through combination with the Lyapunov function, the funnel control was introduced to design the controller, and guarantee the tracking error within the pre-assigned funnel boundary. The adaptive control law was designed based on the rapid changing rate of the hyperbolic tangent function, and the command wave filter was introduced to avoid repeated differentiation problem in the backstepping method. The stability analysis demonstrates the boundedness of all the closed-loop signals. A simulation example shows the effectiveness of the proposed control strategy.

| [1] |
SHE X, LIU J, ALCAIDE A M, et al. Adaptive second-order sliding mode control for grid-connected NPC converters with enhanced disturbance rejection[J]. IEEE Transactions on Power Electronics, 2022, 37(1): 206-220.
|
| [2] |
ZHOU Q, DU P, LI H, et al. Adaptive fixed-time control of error-constrained pure-feedback interconnected nonlinear systems[J]. IEEE Transactions on Systems Man Cybernetics-Systems, 2021, 51(10): 6369-6380.
|
| [3] |
刘祥, 童东兵, 陈巧玉. 基于观测器的非严格反馈时滞非线性系统的神经网络自适应控制[J]. 应用数学和力学, 2021, 42(6): 586-594
LIU Xiang, TONG Dongbing, CHEN Qiaoyu. Observer-based adaptive neural network control for nonstrict-feedback nonlinear systems with time delays[J]. Applied Mathematics and Mechanics, 2021, 42(6): 586-594.(in Chinese)
|
| [4] |
WANG T, GAO H, QIU J. A combined adaptive neural network and nonlinear model predictive control for multirate networked industrial process control[J]. IEEE Transactions on Neural Networks and Learning Systems, 2016, 27(2): 416-425. doi: 10.1109/TNNLS.2015.2411671
|
| [5] |
TRUONG N, PHAM D H, VAN ANH H, et al. Fuzzy-based distributed behavioral control with wall-following strategy for swarm navigation in arbitrary-shaped environments[J]. IEEE Access, 2021, 9: 139176-139185. doi: 10.1109/ACCESS.2021.3119232
|
| [6] |
AYMEN F, MOHAMED N, CHAYMA S, et al. An improved direct torque control topology of a double stator machine using the fuzzy logic controller[J]. IEEE Access, 2021, 9: 126400-126413. doi: 10.1109/ACCESS.2021.3110477
|
| [7] |
WANG Z, ZOU L, SU X, et al. Hybrid force/position control in workspace of robotic manipulator in uncertain environments based on adaptive fuzzy control[J]. Robotics and Autonomous Systems, 2021, 145: 103870.
|
| [8] |
GUAN C, PAN S. Nonlinear adaptive robust control of single-rod electro-hydraulic actuator with unknown nonlinear parameters[J]. IEEE Transactions on Control Systems Technology, 2008, 16(3): 434-445.
|
| [9] |
LI Z, ZHANG R. Time-varying sliding mode control of missile based on suboptimal method[J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 700-710.
|
| [10] |
YU J, SHI P, DONG W, et al. Adaptive fuzzy control of nonlinear systems with unknown dead zones based on command filtering[J]. IEEE Transactions on Fuzzy Systems, 2018, 26(1): 46-55.
|
| [11] |
LI H, HUA C, LI K. Fixed-time stabilization for interconnected high-order nonlinear systems with dead-zone input and output constraint[J]. Journal of the Franklin Institute, 2021, 358(14): 6923-6940.
|
| [12] |
DONG W, FARRELL J A, POLYCARPOU M M, et al. Command filtered adaptive backstepping[J]. IEEE Transactions on Control Systems Technology, 2012, 20(3): 566-580.
|
| [13] |
XIA Y, ZHU Z, FU M. Back-stepping sliding mode control for missile systems based on an extended state observer[J]. IET Control Theory and Applications, 2011, 5(1): 93-102.
|
| [14] |
TALOLE S E, KOLHE J P, PHADKE S B. Extended-state-observer-based control of flexible-joint system with experimental validation[J]. IEEE Transactions on Industrial Electronics, 2010, 57(4): 1411-1419. doi: 10.1109/TIE.2009.2029528
|
| [15] |
郑怀航, 王军政, 刘冬琛, 等. 融合前馈与姿态预测的并联稳定平台自抗扰控制策略[J]. 机械工程学报, 2021, 57(9): 19-27 doi: 10.3901/JME.2021.09.019
ZHENG Huaihang, WANG Junzheng, LIU Dongchen, et al. Active disturbance rejection control strategy of parallel stable platform based on feedforward and attitude prediction[J]. Journal of Mechanical Engineering, 2021, 57(9): 19-27.(in Chinese) doi: 10.3901/JME.2021.09.019
|
| [16] |
张立鹏, 李小华, 何志江. 严格反馈非线性系统基于事件触发的自抗扰预设有限时间跟踪控制[J]. 信息与控制, 2021, 50(4): 441-448, 458
ZHENG Lipeng, LI Xiaohua, HE Zhijiang. Event-triggered preassigned finite-time tracking control with active disturbance rejection for a class of strict feedback nonlinear systems[J]. Information and Control, 2021, 50(4): 441-448, 458.(in Chinese)
|
| [17] |
蒲明, 刘鹏, 熊皑. Fal函数的改进及3种新型非线性扩张状态观测器[J]. 控制与决策, 2021, 36(7): 1655-1662
PU Ming, LIU Peng, XIONG Ai. Advanced Fal function and three novel nonlinear extended state observers[J]. Control and Decision, 2021, 36(7): 1655-1662.(in Chinese)
|
| [18] |
CHENG Y, REN X, ZHENG D, et al. Non-linear bandwidth extended-state-observer based non-smooth funnel control for motor-drive servo systems[J]. IEEE Transactions on Industrial Electronics, 2022, 69(6): 6215-6224.
|
| [19] |
WANG S, YU H, YU J, et al. Adaptive neural funnel control for nonlinear two-inertia servo mechanisms with backlash[J]. IEEE Access, 2019, 7: 33338-33345. doi: 10.1109/ACCESS.2019.2898925
|
| [20] |
WANG H, FANG L, HU M, et al. Adaptive funnel fast nonsingular terminal sliding mode control for robotic manipulators with dynamic uncertainties[J]. Journal of Mechanical Engineering Science, 2021, 235(18): 3678-3693.
|
| [21] |
LI H, ZHAO S, HE W, et al. Adaptive finite-time tracking control of full state constrained nonlinear systems with dead-zone[J]. Automatica, 2019, 100: 99-107.
|
| [22] |
MA M, WANG T, GUO R, et al. Neural network-based tracking control of autonomous marine vehicles with unknown actuator dead-zone[J]. International Journal of Robust and Nonlinear Control, 2022, 32(5): 2969-2982.
|
| [23] |
曾喆昭, 吴亮东, 陈韦名. 基于ESO的一类线性时变系统自学习滑模控制方法[J]. 控制与决策, 2016, 31(11): 2101-2105
ZENG Zhezhao, WU Liangdong, CHEN Weiming. Self-learning sliding mode control method of a class of linear time-varying systems based on ESO[J]. Control and Decision, 2016, 31(11): 2101-2105.(in Chinese)
|
| [24] |
ZHANG J, YANG G. Prescribed performance fault-tolerant control of uncertain nonlinear systems with unknown control directions[J]. IEEE Transactions on Automatic Control, 2017, 62(12): 6529-6535.
|
| [25] |
NA J, LI Y P, HUANG Y B, et al. Output feedback control of uncertain hydraulic servo systems[J]. IEEE Transactions on Industrial Electronics, 2020, 67(1): 490-500.
|
Figures(7) / Tables(1)
Supported by: Beijing Renhe Information Technology Co. Ltd



 DownLoad:
DownLoad: