| Citation: | LU Zeyang, LI Shujiang, WANG Xiangdong. Asymptotic Tracking Control on Profiling Posture of Sprayer Boom Systems With Position Uncertainties[J]. Applied Mathematics and Mechanics, 2022, 43(2): 132-141. doi: 10.21656/1000-0887.420147

|
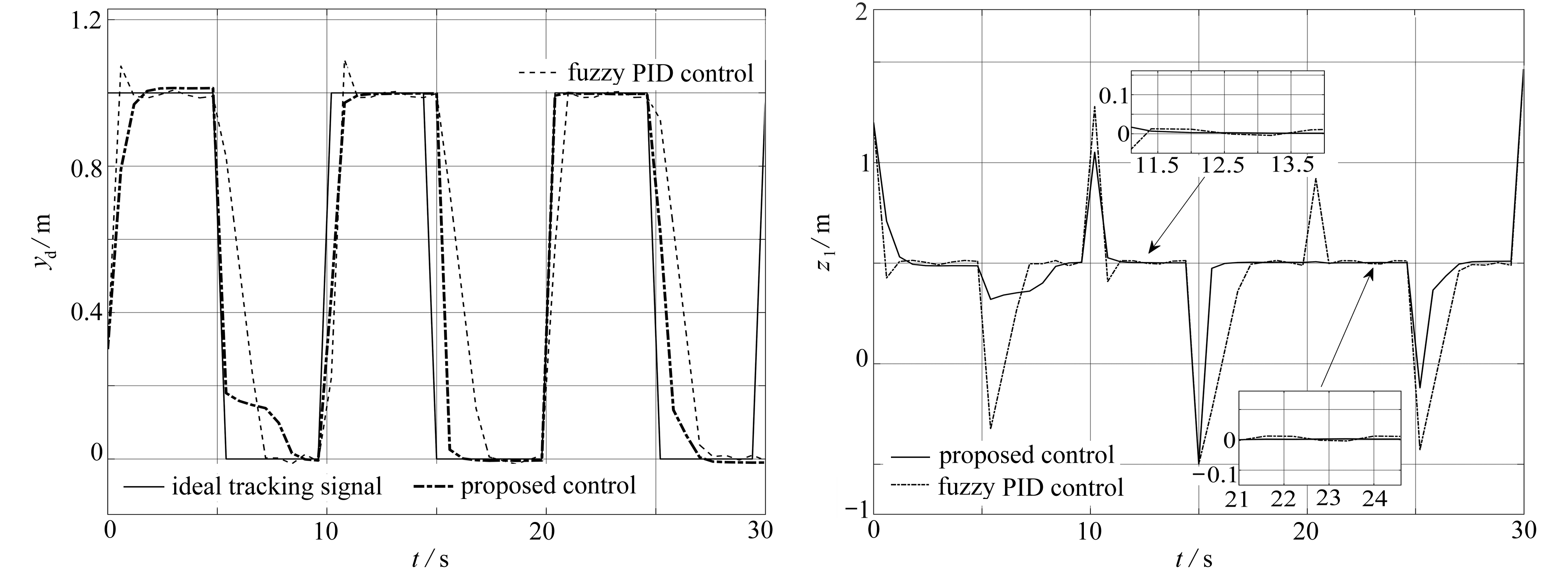
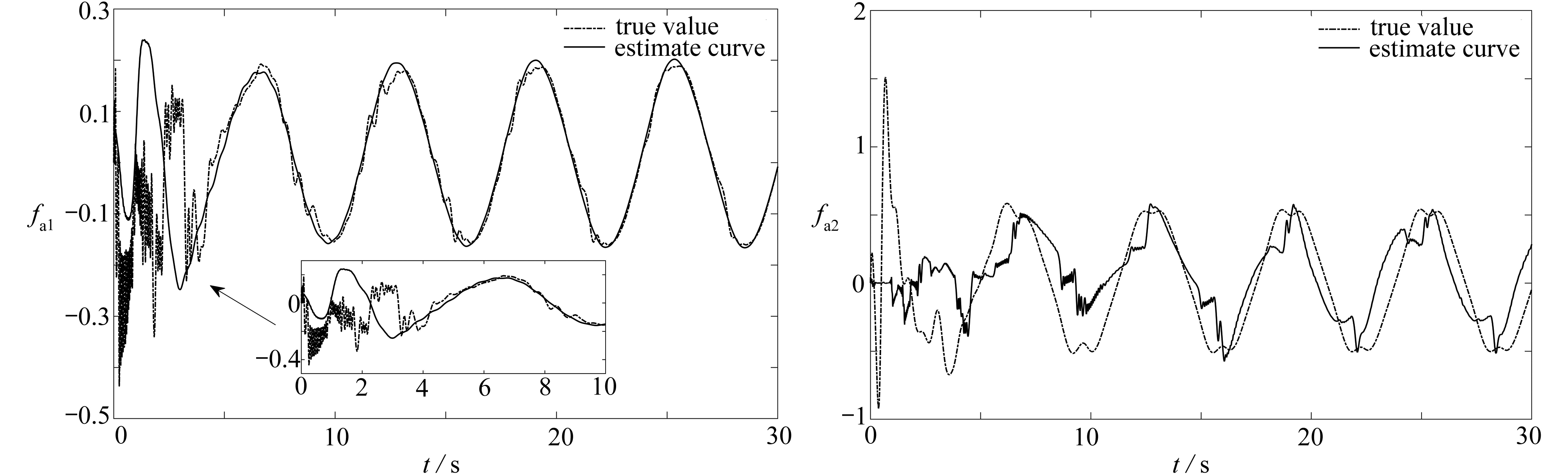
An adaptive and robust backstepping method based on wavelet network approximation was proposed to solve the problems of load variation, unmodeled uncertainties, physical parameter perturbation and external disturbance in the sprayer boom profiling system. Firstly, a complete mathematical model for the boom system with uncertainties, unknowns and nonlinear terms was established and transformed into a state space form with strict feedback. Secondly, the designed wavelet primitive was used to construct the neural network, to approximate the virtual equivalent control part of the backstepping method under the condition that the optimal error is bounded. The adaptive update law was selected to estimate the unknown parameters. The robust compensation term was introduced to reduce the adverse effect of the composite interference on the system. The input command signal order requirement was reduced. Finally, suitable functions were constructed by means of the Lyapunov stability theory, to prove that the position tracking error of the closed-loop system asymptotically converges to the origin. The simulation results show that, the proposed control method can realize the rapid maneuver adjustment of the sprayer boom position and posture, and effectively enhance the robust stability and control accuracy of the boom system.

| [1] |
庄腾飞, 杨学军, 董祥, 等. 大型自走式喷雾机喷杆研究现状及发展趋势分析[J]. 农业机械学报, 2018, 49(S1): 189-198. (ZHUANG Tengfei, YANG Xuejun, DONG Xiang, et al. Research status and development trend of large self-propelled sprayer booms[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(S1): 189-198.(in Chinese) doi: 10.6041/j.issn.1000-1298.2018.S0.025
|
| [2] |
翟长远, 赵春江, WANG Ning, 等. 果园风送喷雾精准控制方法研究进展[J]. 农业工程学报, 2018, 34(10): 1-15. (ZHAI Changyuan, ZHAO Chunjiang, WANG Ning, et al. Research progress on precision control methods of air-assisted spraying in orchards[J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(10): 1-15.(in Chinese) doi: 10.11975/j.issn.1002-6819.2018.10.001
|
| [3] |
崔龙飞, 薛新宇, 丁素明, 等. 双钟摆主被动悬架式大型喷雾机喷杆动力学仿真与试验[J]. 农业机械学报, 2017, 48(2): 82-90. (CUI Longfei, XUE Xinyu, DING Suming, et al. Modeling and simulation of dynamic behavior of large spray boom with active and passive pendulum suspension[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(2): 82-90.(in Chinese) doi: 10.6041/j.issn.1000-1298.2017.02.011
|
| [4] |
魏新华, 邵菁, 缪丹丹, 等. 喷杆式喷雾机喷杆高度及平衡在线调控系统[J]. 农业机械学报, 2015, 46(8): 66-71. (WEI Xinhua, SHAO Jing, MIAO Dandan, et al. Online control system of spray boom height and balance[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(8): 66-71.(in Chinese) doi: 10.6041/j.issn.1000-1298.2015.08.011
|
| [5] |
武秀恒, 秦嘉浩, 杜岳峰, 等. 高地隙喷雾机主动空气悬架减振控制与实验[J]. 农业机械学报, 2018, 49(6): 60-67. (WU Xiuheng, QIN Jiahao, DU Yuefeng, et al. Experiments of vibration control for active pneumatic suspension system in high clearance self-propelled sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(6): 60-67.(in Chinese) doi: 10.6041/j.issn.1000-1298.2018.06.007
|
| [6] |
张盟, 胡炼, 可欣荣, 等. 水田自走式喷雾机喷杆自动调平系统设计与试验[J]. 农机化研究, 2019, 41(10): 45-51. (ZHANG Meng, HU Lian, KE Xinrong, et al. Design and experiment of boom automatic leveling control system for self-propelled paddy sprayer[J]. Journal of Agricultural Mechanization Research, 2019, 41(10): 45-51.(in Chinese) doi: 10.3969/j.issn.1003-188X.2019.10.009
|
| [7] |
TRUONG D Q, AHN K K. Force control for hydraulic load simulator using self-tuning grey predictor-fuzzy PID[J]. Mechatronics, 2009, 19(2): 233-246. doi: 10.1016/j.mechatronics.2008.07.007
|
| [8] |
GUO Q, YU T, JIANG D. High-gain observer-based output feedback control of single-rod electro-hydraulic actuator[J]. IET Control Theory and Applications, 2015, 9(16): 2395-2404. doi: 10.1049/iet-cta.2014.1158
|
| [9] |
URSU L, TOADER A, HALANAY A, et a1. New stahilization and tracking control laws for electro-hydraulic servomechanism[J]. European Journal of Control, 2013, 19(1): 65-80. doi: 10.1016/j.ejcon.2012.07.001
|
| [10] |
GUAN C, PAN S X. Nonlinear adaptive robust control of single-rod electro-hydraulic actuator with unknown nonlinear parameters[J]. IEEE Transactions on Control Systems Technology, 2008, 16(3): 434-445. doi: 10.1109/TCST.2007.908195
|
| [11] |
LU L, YAO B, WANG Q F, et al. Adaptive robust control of linear motors with dynamic friction compensation using modified LuGre model[J]. Automatica, 2009, 45(12): 2890-2896. doi: 10.1016/j.automatica.2009.09.007
|
| [12] |
YAO J Y, JIAO Z X, MA D W. Adaptive robust control of DC motors with extended state observer[J]. IEEE Transactions on Industrial Electronics, 2014, 61(7): 3630-3637. doi: 10.1109/TIE.2013.2281165
|
| [13] |
LU L, YAO B. Energy-saving adaptive robust control of a hydraulic manipulator using fifive cartridge valves with an accumulator[J]. IEEE Transactions on Industrial Electronics, 2014, 61(12): 7046-7054. doi: 10.1109/TIE.2014.2314054
|
| [14] |
LI Y M, TONG S C, LI T S. Observer-based adaptive fuzzy tracking control of MIMO stochastic nonlinear systems with unknown control directions and unknown dead zones[J]. IEEE Transactions on Fuzzy Systems, 2015, 23(4): 1228-1241. doi: 10.1109/TFUZZ.2014.2348017
|
| [15] |
林浩, 李恩, 梁自泽. 具有非线性不确定参数的电液伺服系统自适应backstepping控制[J]. 控制理论与应用, 2016, 33(2): 181-188. (LIN Hao, LI En, LIANG Zize. Adaptive backstepping controller for electro-hydraulic servo system with nonlinear uncertain parameters[J]. Control Theory & Applications, 2016, 33(2): 181-188.(in Chinese)
|
| [16] |
芦泽阳, 李树江, 王向东. 采用RBF网络的喷雾机喷杆自适应动态面跟踪控制[J]. 应用数学和力学, 2019, 40(7): 801-809. (LU Zeyang, LI Shujiang, WANG Xiangdong. Adaptive RBF-network dynamic surface tracking control of sprayer boom systems[J]. Applied Mathematics and Mechanics, 2019, 40(7): 801-809.(in Chinese)
|
| [17] |
侯润民, 刘荣忠, 侯远龙, 等. 自适应模糊小波滑模控制在交流伺服系统中的应用[J]. 兵工学报, 2014, 35(6): 769-775. (HOU Runmin, LIU Rongzhong, HOU Yuanlong, et al. Application of adaptive fuzzy wavelet neural sliding mode control in ac servo system[J]. Acta Armamentarii, 2014, 35(6): 769-775.(in Chinese)
|

Figures(3)
Supported by: Beijing Renhe Information Technology Co. Ltd



 DownLoad:
DownLoad: