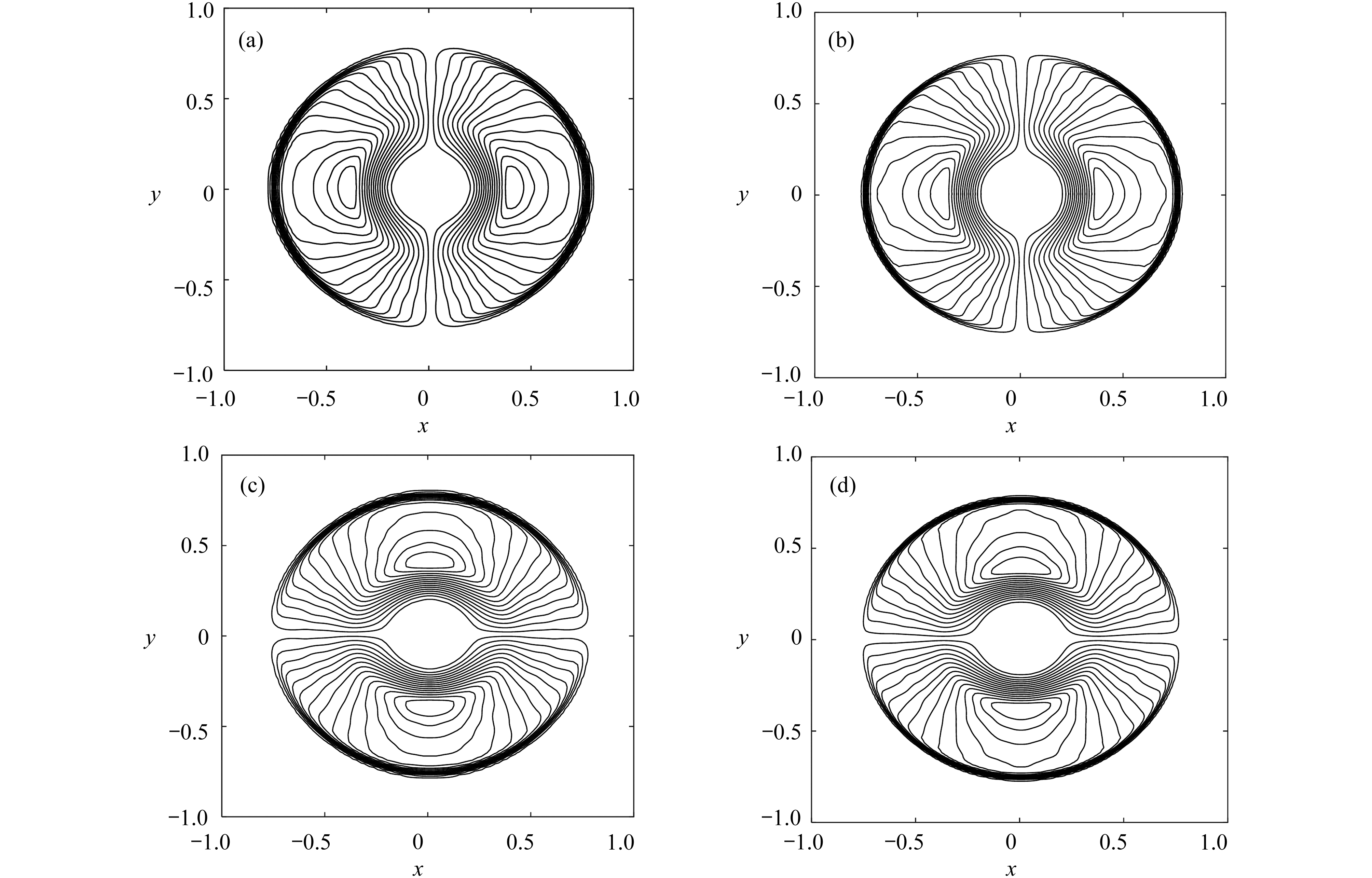
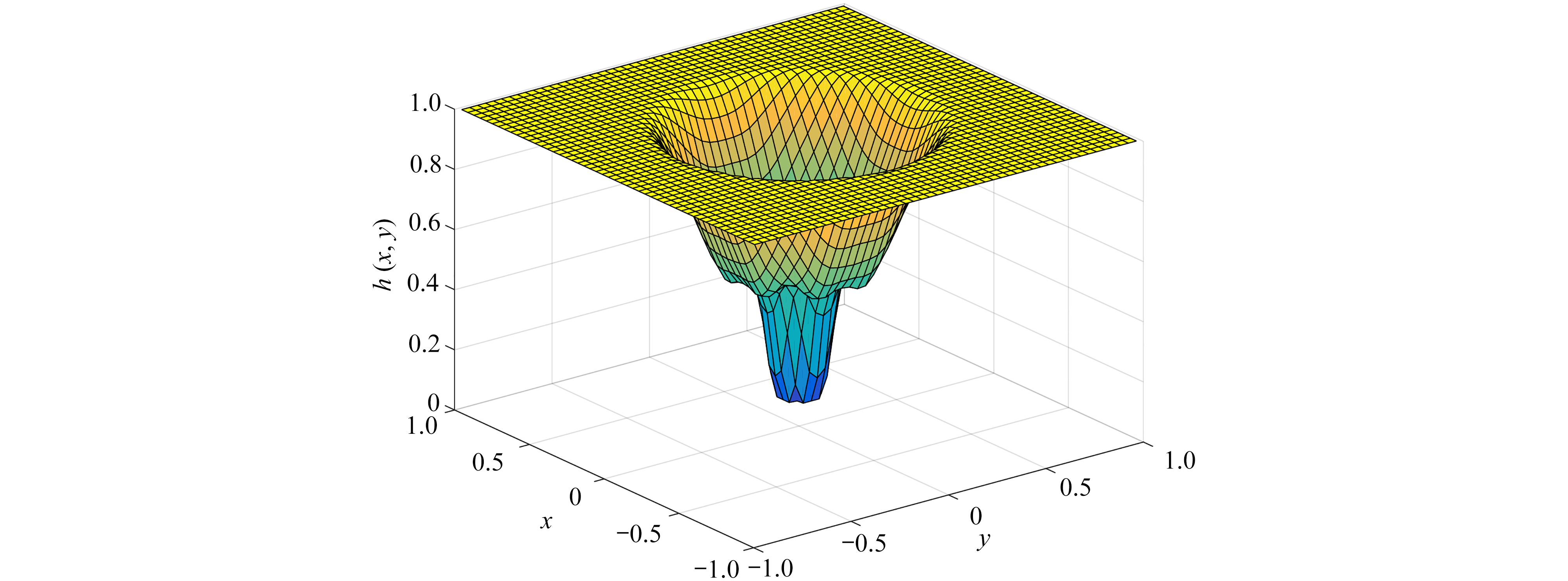
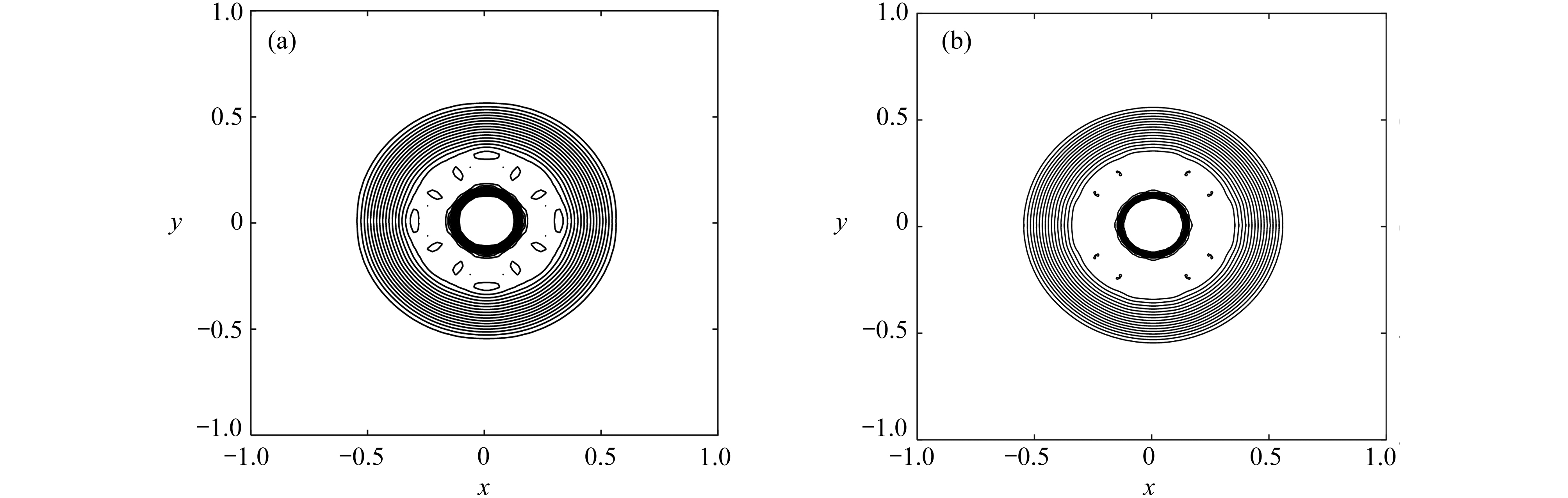
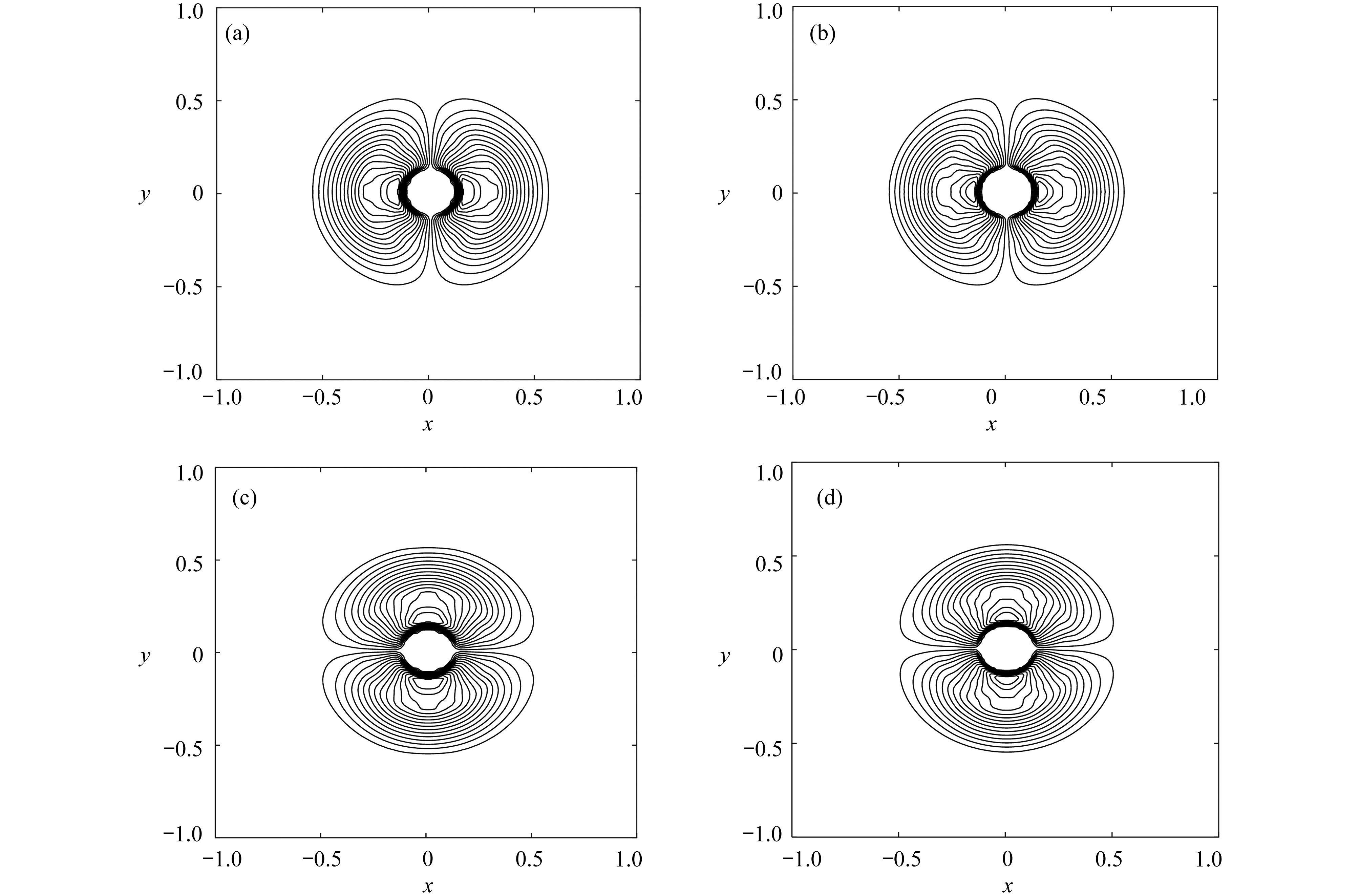
The existent route convergence models are mainly deterministic ones, and various phenomena, such as packet losses, link noises, and sudden changes in interconnecting topology will occur in the route convergence process. Aimed at these random problems, a new stochastic dynamic system model was proposed by means of the Bernoulli white sequence distribution, the Wiener process and the Markov process. Based on the stochastic differential equation theory and the stochastic analysis methods, the sufficient conditions for the route convergence were given. The results prove that, the convergence of the routing state in a random environment is closely related to the Laplacian matrix of the router connection topology, the smooth distribution of the Markov switching, the successful transmission rate of the data packets, and the noise intensity in the network. Finally, a numerical example illustrates the effectiveness of the results.