2025, 46(10): 1342-1353.
doi: 10.21656/1000-0887.450223
Abstract:
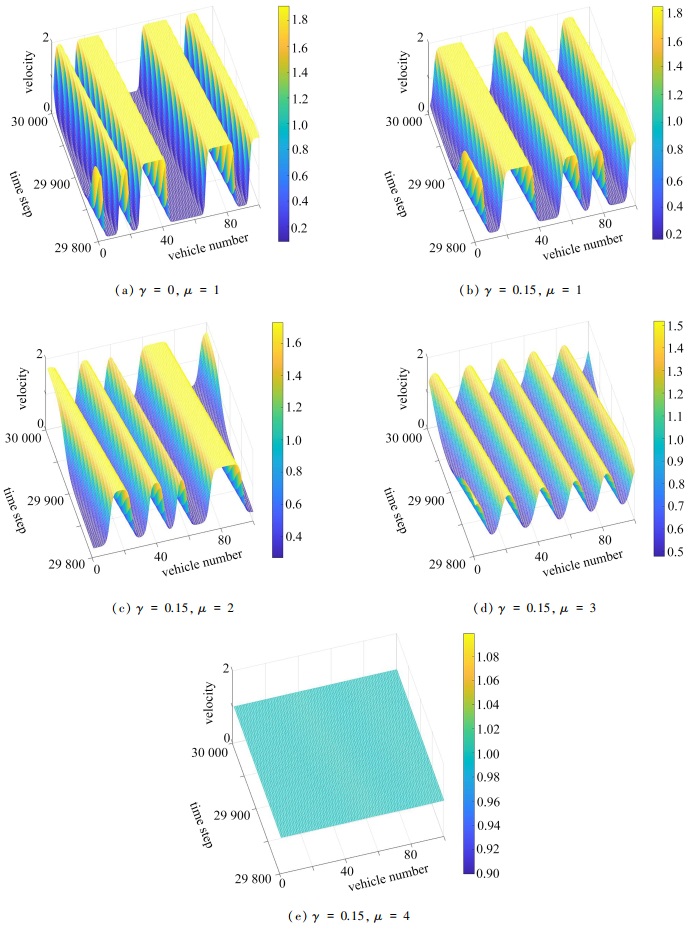
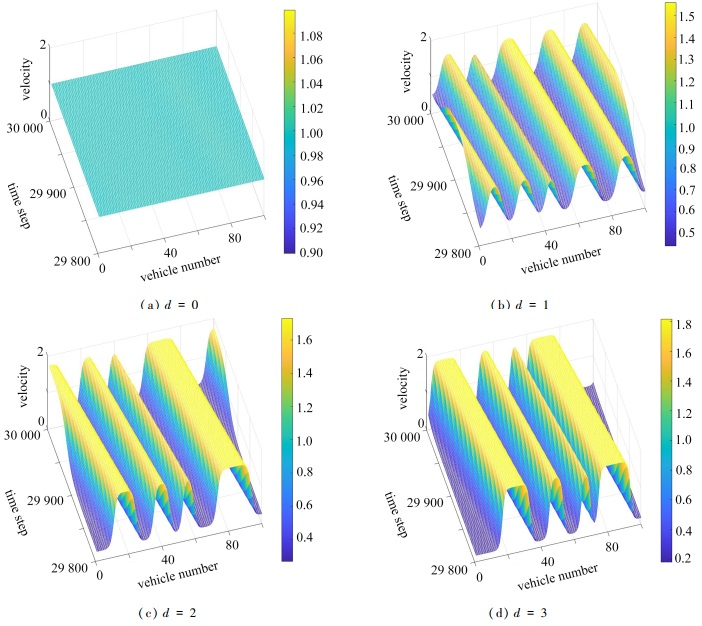
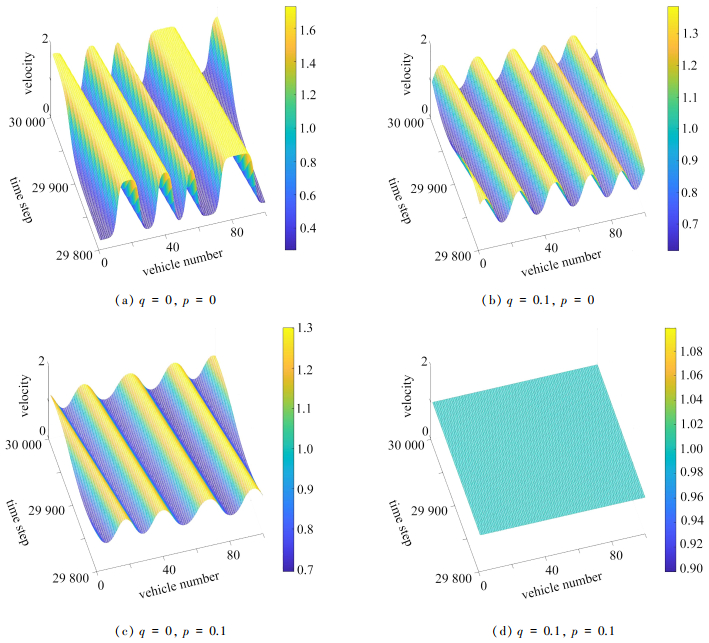
Based on the optimal velocity car-following model and combined with the traffic information collected by autonomous vehicles through mutual communication, an improved discrete-time time-delayed car-following model was proposed to better explore the car-following performances and stability characteristics of autonomous vehicles, with the interaction information between the front autonomous vehicle and the current autonomous vehicle, and the average velocity of multiple front autonomous vehicles considered. In addition, the self-delayed velocity and the space headway control strategy was analyzed. With the control theory method and the Lyapunov stability theory, the stability condition for traffic flow was established. Furthermore, under disturbance, the spatio-temporal evolution of the autonomous vehicle flow was intuitively demonstrated through numerical simulation, to further validate the theoretical analysis and reveal the effects of the autonomous vehicles on the traffic flow stability through the information interaction between vehicles, the average velocity of multiple front vehicles, the time delay factors in the sensing process of velocity and space headway information, and the self-delayed velocity and space headway control strategy. The results show that, the information exchange between vehicles and the acquisition of the average velocity of multiple front vehicles can improve the traffic flow stability. At the same time, the self-delayed velocity and space headway control strategy can effectively improve the traffic flow stability and restrain traffic congestion. However, the time delay factor in the sensing process of velocity and space headway information is not conducive to the traffic flow stability.