

Feasible Region Study on Main Dimensions of CALM Buoys
-
摘要:
为了能够设计合理的单点浮筒主尺度,归纳提出了悬链式单点浮筒5条主要设计原则。基于实际工程经验给出了浮筒重量的母型预估方法,探讨储备浮力,提出等干舷方案集,基于静力学原理和水动力分析探讨了浮筒的自由漂浮稳性及浮筒的运动响应,梳理了垂荡及摇摆随浮筒直径的变化规律。以25 m和100 m水深的浮筒直径上限和下限为边界建立可行域,分别以三个实际项目采纳的浮筒直径和45 m水深下单点浮筒直径的可行范围为参考,开展浮筒直径可行域的验证。研究表明:环境条件等不同因素也会引起相同水深下浮筒直径可行域的变化,因此在可行域的实际应用中应进一步考虑一定的偏差裕量。该文的可行域研究对于悬链式单点浮筒的主尺度确定具有积极的指导意义。
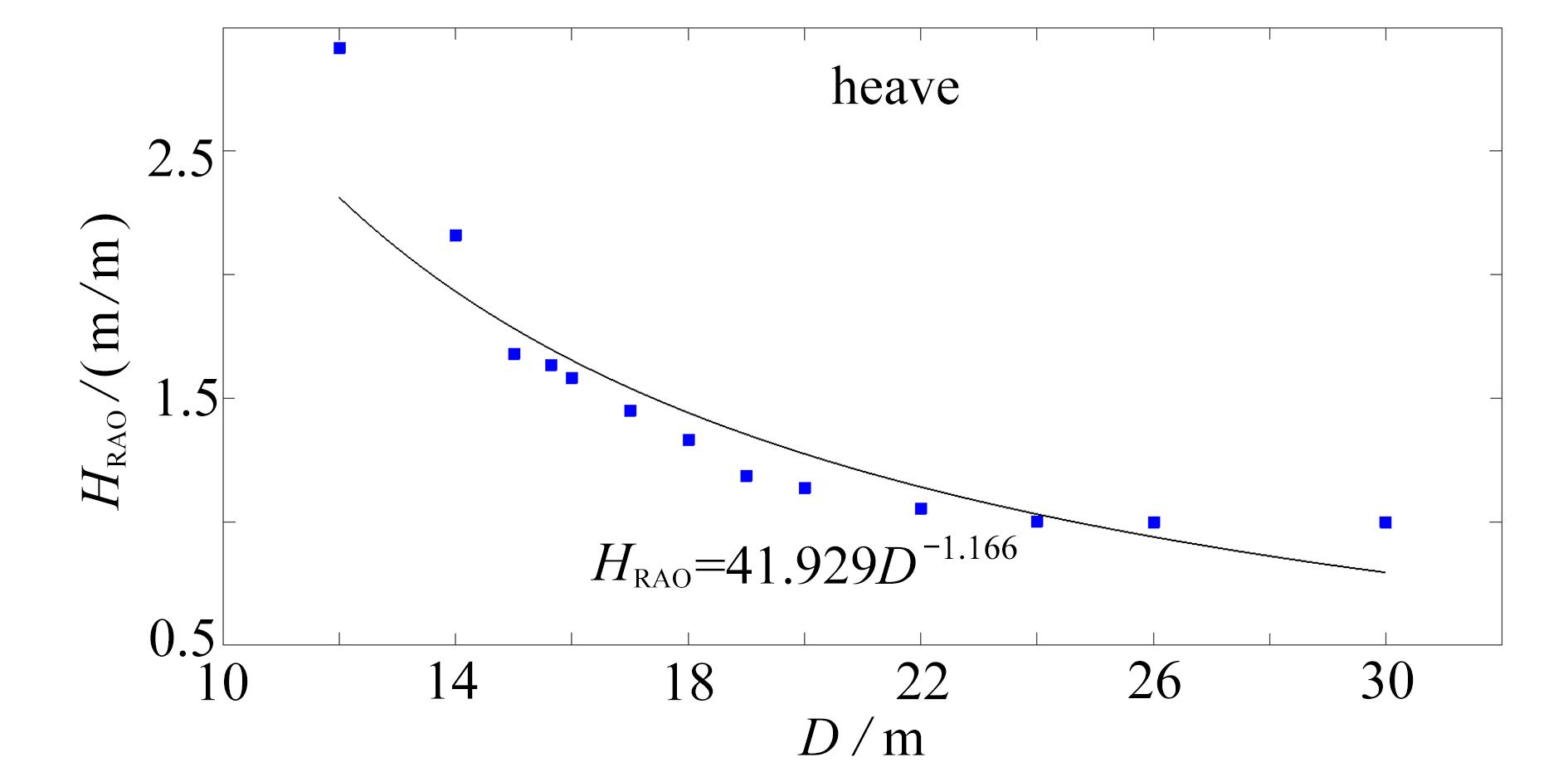
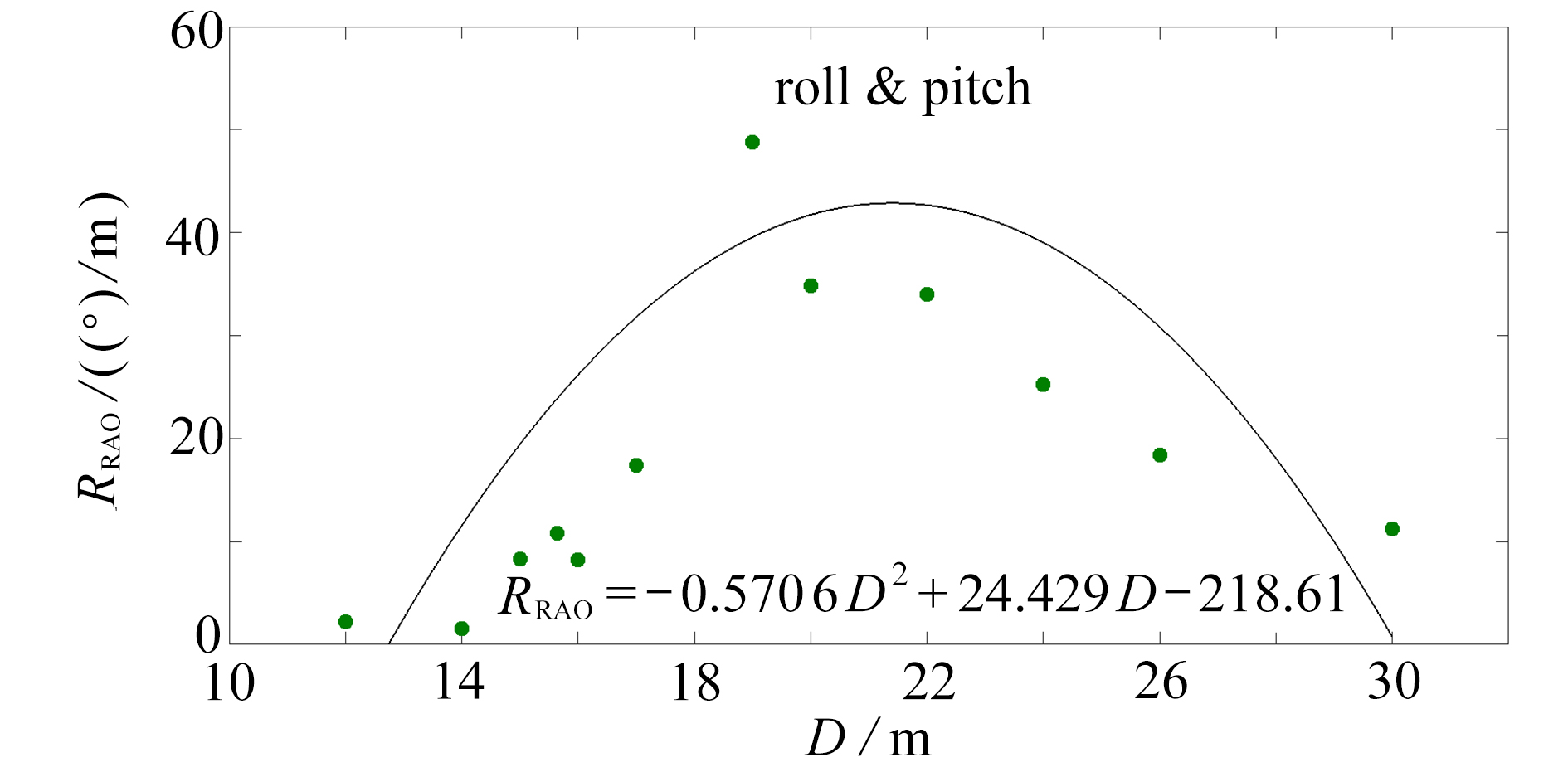
Abstract:To design reasonable main dimensions of catenary anchor leg mooring (CALM) buoys, 5 main design requirements were summarized. Based on practical engineering experiences, the mother model estimation method was established against the buoy weight. The reserve buoyancy was discussed, and the equal freeboard scheme set was proposed. The free floating stability of buoys was discussed based on the statics principle. Dynamic responses of buoys were discussed base on hydrodynamics, with the heave and roll characteristic vs. CALM buoy diameters presented. With the upper and lower limits on buoy diameters under 25 m and 100 m water depths as the boundary, a feasible region was built up. Its accuracy was verified in the actual engineer case under the 3 environmental conditions and by reference to the theoretical CALM buoy diameter feasible region under the 45 m water depth. The results show that, different factors, such as the environmental conditions, the mooring chain weight and others can influence the feasible region of buoy diameters, even under the same water depth. A deviation margin of the feasible region should be further considered in practical application. The study of the feasible region has a positive guiding significance to the determination of the main dimensions of CALM buoys.
-
Key words:
- CALM buoy /
- main dimension /
- feasible region
-
表 1 环境条件
Table 1. Environmental conditions
parameter unit project 1 project 2 project 3 operating condition standalone condition operating condition standalone condition operating condition standalone condition $ {H}_{\mathrm{s}} $ m 2.5 6 2.6 3.9 3 13 $ {T}_{\mathrm{p}} $ s 7.1 10.3 7.5 8.5 9.2 14.7 $ {V}_{\mathrm{w}} $ m/s 17.1 28.3 22 26 23.6 41.6 $ {V}_{\mathrm{c}} $ m/s 1.2 1.73 0.7 0.8 1.22 2.1  下载: 导出CSV
下载: 导出CSV
表 2 油轮参数
Table 2. Tanker parameters
parameter unit full loading ballast $ T $ m 22.6 9.937 $\varDelta$ kg 3.671 2E+8 1.438 3E+8 $ {X}_{\mathrm{c}\mathrm{o}\mathrm{g}} $ m 170.18 171.04 $ {Y}_{\mathrm{c}\mathrm{o}\mathrm{g}} $ m 0 0 $ {Z}_{\mathrm{c}\mathrm{o}\mathrm{g}} $ m 17.3 11.62 $ {I}_{xx} $ kg·m2 8.26E+10 6.564E+10 $ {I}_{yy} $ kg·m2 2.35E+12 9.53E+11 $ {I}_{zz} $ kg·m2 2.35E+12 9.53E+11
下载: 导出CSV
表 3 等干舷方案浮筒型深
Table 3. Buoy depths with equal freeboards
D/m buoy depth with equal freeboard $ {W}_{\mathrm{F}\mathrm{B}} $/m $ {W}_{\mathrm{D}} $=25 m $ {W}_{\mathrm{D}} $=45 m $ {W}_{\mathrm{D}} $=100 m 10 6.44 7.16 13.62 11 5.77 6.29 11.85 12 5.30 5.67 10.54 13 4.95 5.21 9.55 14 4.69 4.85 8.76 15 4.48 4.57 8.14 16 4.31 4.34 7.63 17 4.17 4.15 7.20 18 4.05 3.99 6.85
下载: 导出CSV
表 4 浮筒初稳心高
$ {H}_{\overline{GM}} $ Table 4. Buoy initial metacentric heights
D/m buoy initial metacentric height $ {H}_{\overline{GM}} $/m $ {W}_{\mathrm{D}} $=25 m $ {W}_{\mathrm{D}} $=45 m $ {W}_{\mathrm{D}} $=100 m 10 −0.51 −1.66 −5.17 11 0.38 −0.70 −3.89 12 1.37 0.36 −2.70 13 2.48 1.57 −1.55 14 3.72 2.93 −0.38 15 5.07 4.47 0.83 16 5.65 6.21 2.10 17 8.18 8.14 3.43 18 9.93 10.29 4.85
下载: 导出CSV
表 5 浮筒横摇固有周期
Table 5. Buoy roll natural periods
$ D $/m buoy roll natural period $ {T}_{\mathrm{n}} $/s $ {W}_{\mathrm{D}} $=25 m $ {W}_{\mathrm{D}} $=45 m $ {W}_{\mathrm{D}} $=100 m 10 − − − 11 14.97 − − 12 8.42 17.10 − 13 6.85 8.70 − 14 6.13 6.95 − 15 5.76 6.17 15.26 16 5.50 5.71 9.48 17 5.38 5.45 7.85 18 5.29 5.27 6.82
下载: 导出CSV
表 6 可行域偏差验证(45 m水深)
Table 6. Feasible area difference verification (water depth 45 m)
item feasible region
Rfeasible/mverified feasible region Rverified-feasible/m difference δ/% diameter upper limit 13.13 12.85 2.14 diameter lower limit 11.73 11.66 0.63
下载: 导出CSV
-
[1] HARING R E, ADAMS R B, BEAZLEY R A, et al. Application of probability to design of single-point moorings[J]. Society of Petroleum Engineers Journal, 1969, 10(3): 219-228. [2] BERNITSAS M M, PAPOULIAS F A. Stability of single point mooring systems[J]. Applied Ocean Research, 1986, 8(1): 49-58. doi: 10.1016/S0141-1187(86)80031-1 [3] HWANG Y L. Dynamic analysis for the design of CALM system in shallow and deep waters[J]. Journal of Offshore Mechanics and Arctic Engineering-Transactions of the ASME, 1997, 119(3): 151-157. doi: 10.1115/1.2829062 [4] SCHELLIN T E. Mooring load of a ship single-point moored in a steady current[J]. Marine Structures, 2003, 16(2): 135-148. doi: 10.1016/S0951-8339(02)00024-2 [5] AKYUZ E, CELIK E, A modified human reliability analysis for cargo operation in single point mooring (SPM) off-shore units[J]. Applied Ocean Research, 2016, 58: 11-20. [6] BROWN A, GORTER W, PAALVAST M, et al. Design approach for CALM buoy moored vessel in squall conditions[C]//35th International Conference on Ocean, Offshore and Arctic Engineering. American Society of Mechanical Engineers, 2016. [7] GU H Y, CHEN H C, ZHAO L Y. Coupled mooring analysis of a CALM buoy by a CFD approach[C]//The 27th International Ocean and Polar Engineering Conference. OnePetro, 2017. [8] 黄国樑, 藤野正隆. 关于风和潮流作用下单点系泊船体的鱼尾状摆动的研究[J]. 海洋工程, 1987, 5(3): 1-13. (HUANG Guoliang, FUJINO M. Fishtailing oscillation of a ship moored to single point mooring systems in wind and current[J]. The Ocean Engineering, 1987, 5(3): 1-13.(in Chinese) [9] 季春群, 王磊, 彭涛. 单点系泊的系泊稳定性分析[J]. 中国海洋平台, 1998, 13(5/6): 12-14. (JI Chunqun, WANG Lei, PENG Tao. The moored stability of single point mooring system[J]. China Offshore Platform, 1998, 13(5/6): 12-14.(in Chinese) [10] 杜度, 张纬康, 单点系泊船舶运动的仿真研究[J]. 计算机仿真, 2003, 20(6): 96-99, 103.DU Du, ZHANG Weikang, Simulation study on motion of sigle point mooring vessel[J]. Computer Simulation, 2003, 20(6): 96-99, 103. (in Chinese) [11] 孙强, 彭贵胜, 董庆辉. 悬链式单点系泊系统设计与分析方法研究[C]//第十六届中国科协年会(分8): 绿色造船与安全航运论坛论文集. 2014: 126-131.SUN Qiang, PENG Guisheng, DONG Qinghui. Design and analysis method research on CALM type single point mooring system[C]//16th Annual Meeting of China Association for Science and Technology (Part Eight): Forum on Green Shipbuilding and Safe Shipping. 2014: 126-131. (in Chinese) [12] 周楠, 刘旭平, 李俊汲. CALM单点系泊系统设计综述[J]. 海洋工程装备与技术, 2017, 4(2): 102-104. (ZHOU Nan, LIU Xuping, LI Junji. Design method summary of CALM single point mooring[J]. Ocean Engineering Equipment and Technology, 2017, 4(2): 102-104.(in Chinese) doi: 10.3969/j.issn.2095-7297.2017.02.008 [13] American Bureau of Shipping. Single point moorings[S]. Act of Legislature of the State of New York, 2019. [14] BERNARD M. 海洋工程水动力学[M]. 北京: 国防工业出版社, 2012: 151-154.BERNARD M. Hydrodynamique des Structures Offshore[M]. Beijing: National Defense Industry Press, 2012: 151-154. (in Chinese) [15] 芦苇, 赵冬, 李东波, 等. 基于期望函数的土遗址锚固参数组合优化方法[J]. 应用数学和力学, 2019, 40(6): 650-662.LU Wei, ZHAO Dong, LI Dongbo, et al. A composite optimization method for anchorage parameters of rammed earth sites based on desirability functions[J] Applied Mathematics and Mechanics, 2019, 40(6): 650-662. (in Chinese) -




计量
- 文章访问数: 923
- HTML全文浏览量: 316
- PDF下载量: 46
- 被引次数: 0

 渝公网安备50010802005915号
渝公网安备50010802005915号