

Design and Sensing Theory for Flexible Multi-Layer Equal Strength Beam Force/Displacement Sensors With High Sensitivity
-
摘要:
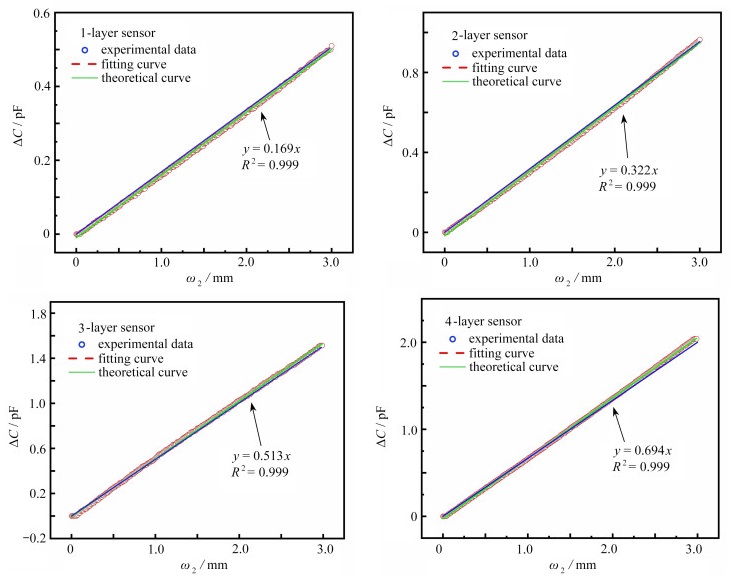
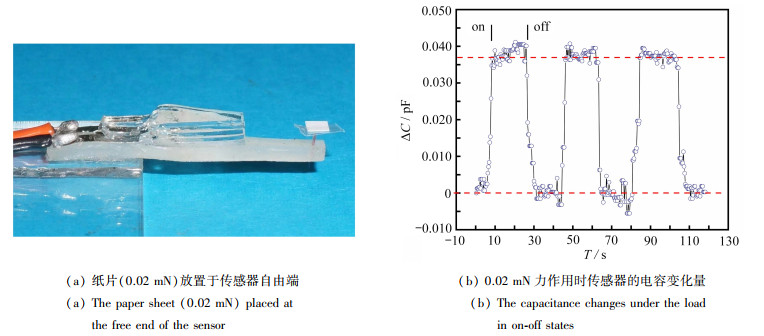
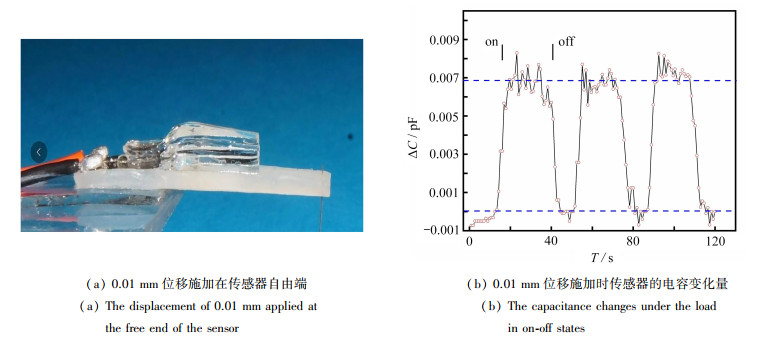
针对目前柔性传感器大多数结构为薄膜形式,不利于法向集中力与位移同时测量的问题,设计并制备了一种基于多层离子皮肤(柔性电容传感片)的等强度梁式传感器. 该触觉传感器由多层离子皮肤和等强度梁构成. 当梁的自由端接触被测物时,传感器可以将力或位移转化为输出的电容信号来进行法向接触力或位移的测量. 建立了传感器电容变化量与梁自由端力/位移关系的传感理论模型,并通过力/位移加载试验对传感理论模型进行验证. 试验结果表明,传感器的传感理论模型与试验结果吻合较好,当传感器具有四层结构时,对力/位移测量的灵敏度分别为1.855 mN/pF和0.694 mm/pF. 所能测得最小力为0.02 mN,最小位移为0.01 mm,同时该传感器表现出良好线性度(R2=0.994). 该传感理论模型可为此类传感器的设计提供理论依据,在柔性机器和医疗健康检测等领域具有良好的应用前景.
Abstract:An equal-strength cantilever beam sensor based on the multi-layer ionic skin (flexible capacitance sensor chips) was designed and prepared, to solve the problem that most existing thin-film-structure flexible sensors cannot simultaneously measure concentrated normal forces and displacements. The proposed sensor is comprised of the multi-layer ionic skin and the equal-strength cantilever beam. The normal contact forces or displacements can be acquired through measurement of the capacitance change of the sensor, with the free end of the beam contacting the measured object. A theoretical sensing model of the relationship between capacitance change and force/displacement was established and then verified through displacement/force loading tests. The test results show that, the sensing model is in good agreement with the test data. For the measurement of force and displacement, the sensitivity of the sensor with a 4-layer structure is 1.855 mN/pF and 0.694 mm/pF, respectively. The minimum measurable force is 0.02 mN and the minimum measurable displacement is 0.01 mm. At the same time, the sensor shows good linearity (R2=0.994). This sensing model provides a theoretical basis for the design of such sensors with good application prospects in the fields of flexible machines and medical health detection.
-
Key words:
- flexible sensor /
- equal strength cantilever beam /
- displacement /
- force
edited-byedited-by1) (我刊编委刘少宝推荐) -

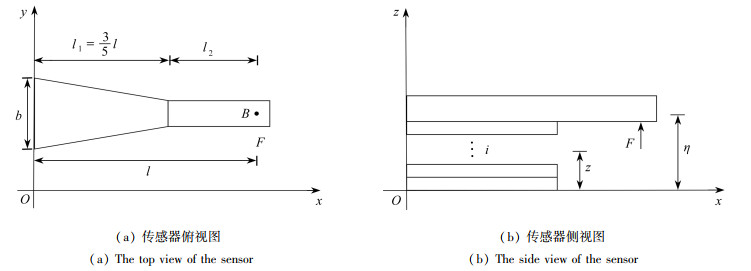
图 1 基于双层电容传感片的等强度梁式力/位移传感器结构示意图
Figure 1. A force/displacement sensor based on a variable cross-section cantilever beam with the double-layer capacitive sensing chip

图 2 单轴拉伸时单层电容传感片的变形示意图
Figure 2. Schematic diagram of the deformation of a single-layer capacitive sensing chip under uniaxial stretching

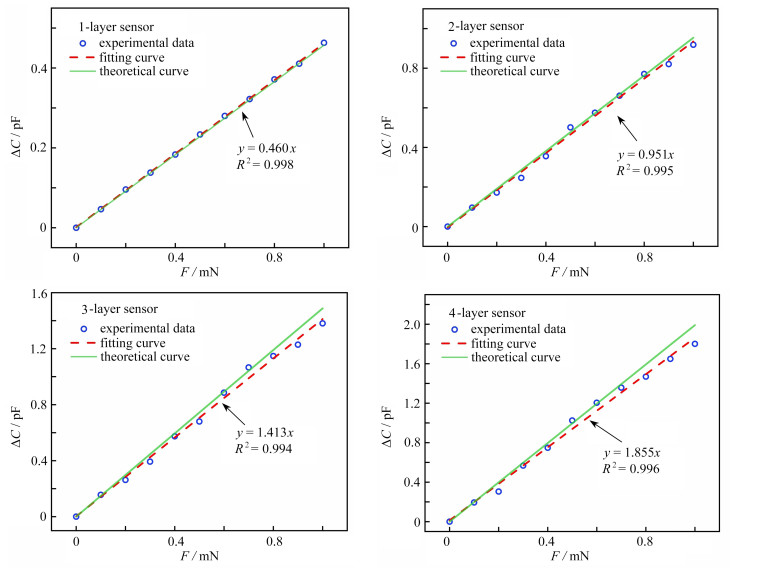
图 6 不同层数传感器电容变化量与力的关系
Figure 6. The relationships between capacitance changes and forces with different-layer capacitive sensing chips

图 7 不同层数传感器电容变化量与位移关系
Figure 7. The relationships between capacitance changes and displacements with different-layer capacitance sensing chips
表 1 不同传感器可测量的最小力对比
Table 1. Minimum detectable forces with different sensor types
source type minimum detectable force ref. [27] capacitance sensor 0.07 N ref. [28] capacitance sensor 0.01 N ref. [29] capacitance sensor 0.009 N ref. [30] capacitance sensor 0.05 mN ref. [20] fiber Bragg grating sensor 0.011 N ref. [31] piezoresistive sensor 0.08 N ref. [32] piezoelectric sensor 0.05 N ref. [33] optical sensor 0.52 mN this work capacitance sensor 0.02 mN  下载: 导出CSV
下载: 导出CSV
表 2 不同传感器所探测到的最小位移对比
Table 2. Minimum detectable displacements with different sensor types
下载: 导出CSV
-
[1] 苏炳添, 李健良, 徐慧华, 等. 科学训练辅助: 柔性可穿戴传感器运动监测应用[J]. 中国科学: 信息科学, 2022, 52(1): 54-74. https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX202201002.htmSU Bingtian, LI Jianliang, XU Huihua, et al. Scientific athletics training: flexible sensors and wearable devices for kineses monitoring applications[J]. Scientia Sinica: Informationis, 2022, 52(1): 54-74. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX202201002.htm [2] 王海涛, 彭熙凤, 林本末. 软体机器人研究进展[J]. 华南理工大学学报(自然科学版), 2020, 48(2): 94-106. https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG202002012.htmWANG Haitao, PENG Xifeng, LIN Benmo. Research development of soft robots[J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(2): 94-106. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG202002012.htm [3] 许会超, 苗新刚, 汪苏. 基于FBG的机器人柔性触觉传感器[J]. 机器人, 2018, 40(5): 634-639. https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201805008.htmXU Huichao, MIAO Xingang, WANG Su. A flexible tactile sensor for robot based on FBG[J]. Robot, 2018, 40(5): 634-639. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201805008.htm [4] KUANG L, LOU Y, SONG S. Design and fabrication of a novel force sensor for robot grippers[J]. IEEE Sensors Journal, 2018, 18(4): 1410-1418. doi: 10.1109/JSEN.2017.2788015 [5] 林鹏, 王长利, 李迅, 等. 压杆式压电应力传感器在爆炸冲量测试中的应用[J]. 应用数学和力学, 2015, 36(S1): 29-35. https://www.zhangqiaokeyan.com/academic-journal-cn_detail_thesis/0201292956976.htmlLIN Peng, WANG Changli, LI Xun, et al. Application of the piezoelectric pressure bar gauge to blast impulse measurement[J]. Applied Mathematics and Mechanics, 2015, 36(S1): 29-35. (in Chinese) https://www.zhangqiaokeyan.com/academic-journal-cn_detail_thesis/0201292956976.html [6] 赵智忠, 王春雷, 王博文. 适用于智能机械手的Galfenol悬臂梁式力传感器设计[J]. 仪表技术与传感器, 2020(9): 1-5. https://www.cnki.com.cn/Article/CJFDTOTAL-YBJS202009001.htmZHAO Zhizhong, WANG Chunlei, WANG Bowen. Galfenol cantilever beam force sensor design suitable for intelligent manipulator[J]. Instrument Technique and Sensor, 2020(9): 1-5. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YBJS202009001.htm [7] YANG W D, DING W X, LIU M L, et al. A theoretical model of a flexible capacitive pressure sensor with microstructured electrodes for highly sensitive electronic skin[J]. Journal of Physics D: Applied Physics, 2022, 55(9): 094001. doi: 10.1088/1361-6463/ac34a9 [8] DONG T Y, GU Y, LIU T, et al. Resistive and capacitive strain sensors based on customized compliant electrode: comparison and their wearable applications[J]. Sensors and Actuators A: Physical, 2021, 326: 112720. doi: 10.1016/j.sna.2021.112720 [9] BASARIR F, MADANI Z, VAPAAVUORI J. Recent advances in silver nanowire based flexible capacitive pressure sensors: from structure, fabrication to emerging applications[J]. Advanced Materials Interfaces, 2022, 9(31): 2200866. doi: 10.1002/admi.202200866 [10] SUN J Y, KEPLINGER C, WHITESIDES G M, et al. Ionic skin[J]. Advanced Materials, 2014, 26(45): 7608-7614. doi: 10.1002/adma.201403441 [11] GOU X, YANG J, LI P, et al. Biomimetic nanofiber-iongel composites for flexible pressure sensors with broad range and ultra-high sensitivity[J]. Nano Energy, 2024, 120: 109140. doi: 10.1016/j.nanoen.2023.109140 [12] XU S J, YU J X, GUO H S, et al. Force-induced ion generation in zwitterionic hydrogels for a sensitive silent-speech sensor[J]. Nature Communications, 2023, 14(1): 219. doi: 10.1038/s41467-023-35893-7 [13] ZHOU L J, WANG Z W, WU C S, et al. Highly sensitive pressure and strain sensors based on stretchable and recoverable ion-conductive physically cross-linked double-network hydrogels[J]. ACS Applied Materials and Interfaces, 2020, 12(46): 51969-51977. doi: 10.1021/acsami.0c15108 [14] STANO G, DI NISIO A, LANZOLLA A M, et al. Additive manufacturing for capacitive liquid level sensors[J]. The International Journal of Advanced Manufacturing Technology, 2022, 123(7/8): 2519-2529. [15] ARSHAD A, SALEEM M M, TIWANA M I, et al. A high sensitivity and multi-axis fringing electric field based capacitive tactile force sensor for robot assisted surgery[J]. Sensors and Actuators A: Physical, 2023, 354: 114272. doi: 10.1016/j.sna.2023.114272 [16] 王瑞荣, 侯鹏飞, 刘继军, 等. 基于微结构PDMS介质层的电容式柔性阵列压力传感器[J]. 微纳电子技术, 2019, 56(5): 389-393. https://www.cnki.com.cn/Article/CJFDTOTAL-BDTQ201905009.htmWANG Ruirong, HOU Pengfei, LIU Jijun, et al. Capacitive flexible array pressure sensor based on the microstructure PDMS dielectric layer[J]. Micronanoelectronic Technology, 2019, 56(5): 389-393. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BDTQ201905009.htm [17] WANG Y C, CHEN T Y, CHEN R, et al. Mutual capacitive flexible tactile sensor for 3-D image control[J]. Journal of Microelectromechanical Systems: a Joint IEEE and ASME Publication on Microstructures, Microactuators, Microsensors, and Microsystems, 2013, 22(3): 804-814. [18] ZHANG Y Z, LIN Z K, HUANG X P, et al. Highly sensitive capacitive pressure sensor with elastic metallized sponge[J]. Smart Materials and Structures, 2019, 28(10): 105023. doi: 10.1088/1361-665X/ab3a0c [19] BAI N N, WANG L, WANG Q, et al. Graded intrafillable architecture-based iontronic pressure sensor with ultra-broad-range high sensitivity[J]. Nature Communications, 2020, 11(1): 209. doi: 10.1038/s41467-019-14054-9 [20] 彭星玲, 茶映鹏, 叶建雄, 等. 基于FBG的悬臂梁式微力与微位移传感单元[J]. 激光与红外, 2022, 52(6): 870-874. doi: 10.3969/j.issn.1001-5078.2022.06.012PENG Xingling, CHA Yingpeng, YE Jianxiong, et al. Cantilever beam type micro-force and micro-displacement sensing unit based on fiber bragg grating[J]. Laser and Infraredpeng, 2022, 52(6): 870-874. (in Chinese) doi: 10.3969/j.issn.1001-5078.2022.06.012 [21] SUN H, KIM D S, SHANMUGASUNDARAM A, et al. Enhancing cardiomyocytes contraction force measuring in drug testing: integration of a highly sensitive single-crystal silicon strain sensor into SU-8 cantilevers[J]. Biosens Bioelectron, 2024, 243: 115756. doi: 10.1016/j.bios.2023.115756 [22] NI N, XUE X M, LI D B. Extra-soft tactile sensor for sensitive force/displacement measurement with high linearity based on a uniform strength beam[J]. Materials, 2021, 14(7): 1743. doi: 10.3390/ma14071743 [23] 王单, 王健. 重力载荷作用下柔性梁的结构变形与承载力分析[J]. 应用数学和力学, 2021, 42(6): 611-622. doi: 10.21656/1000-0887.410169WANG Dan, WANG Jian. Analysis of deformation and bearing capacity of flexible beams under gravitational loads[J]. Applied Mathematics and Mechanics, 2021, 42(6): 611-622. (in Chinese) doi: 10.21656/1000-0887.410169 [24] QIU K Y, ZHAO Z C, HAGHIASHTIANI G, et al. 3D printed organ models with physical properties of tissue and integrated sensors[J]. Advanced Materials Technologies, 2018, 3(3): 1700235. doi: 10.1002/admt.201700235 [25] 谢思豪, 陶青, 陈思远. SMS结构的光纤F-P腔压力传感器的实验研究[J]. 传感器与微系统, 2024, 43(1): 56-58. https://www.cnki.com.cn/Article/CJFDTOTAL-CGQJ202401014.htmXIE Sihao, TAO Qing, CHEN Siyuan. Experimental research of optical fiber F-P cavity pressure sensor with SMS structure[J]. Transducer and Microsystem Technologies, 2024, 43(1): 56-58. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CGQJ202401014.htm [26] MORAIS E, PONTES M J, MARQUES C, et al. Liquid level sensor with two FBGs embedded in a PDMS diaphragm: analysis of the linearity and sensitivity[J]. Sensors, 2022, 22(3): 1268. doi: 10.3390/s22031268 [27] DAI Y, CHEN J, TIAN W, et al. A PVDF/Au/PEN multifunctional flexible human-machine interface for multidimensional sensing and energy harvesting for the internet of things[J]. IEEE Sensors Journal, 2020, 20(14): 7556-7568. doi: 10.1109/JSEN.2020.2974096 [28] LIU Y, WO H, HUANG S, et al. A flexible capacitive 3D tactile sensor with cross-shaped capacitor plate pair and composite structure dielectric[J]. IEEE Sensors Journal, 2021, 21(2): 1378-1385. doi: 10.1109/JSEN.2020.3021010 [29] JINHUI Z, HAIMIN Y, JIAYING M, et al. Finger-inspired rigid-soft hybrid tactile sensor with superior sensitivity at high frequency[J]. Nature Communications, 2022, 13(1): 5076. doi: 10.1038/s41467-022-32827-7 [30] LUO Z B, CHEN J, ZHU Z F, et al. High-resolution and high-sensitivity flexible capacitive pressure sensors enhanced by a transferable electrode array and a micropillar-PVDF film[J]. ACS Applied Materials and Interfaces, 2021, 13(6): 7635-7649. [31] JUNG Y, LEE D G, PARK J, et al. Piezoresistive tactile sensor discriminating multidirectional forces[J]. Sensors, 2015, 15(10): 25463. [32] 洪吉, 任宗金, 于时恩, 等. 压电传感器的毫牛级摩擦力测量[J]. 压电与声光, 2022, 44(6): 885-889. https://www.cnki.com.cn/Article/CJFDTOTAL-YDSG202206012.htmHONG Ji, REN Zongjin, YU Shinen, et al. Measurement of friction force at milli-Newton level with piezoelectric sensors[J]. Piespelectrics and Acousoopticshongjil, 2022, 44(6): 885-889. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YDSG202206012.htm [33] LI T, PAN A, REN H. A high-resolution triaxial catheter tip force sensor with miniature flexure and suspended optical fibers[J]. IEEE Transactions on Industrial Electronics, 2020, 67(6): 5101-5111. [34] WU J H, XU Z L, ZHANG Y X, et al. High-resolution two-degree-of-freedom displacement measurement based on fiber Fabry-Perot interferometer and Pound-Drever-Hall technique[J]. IEEE Sensors Journal, 2023, 23(15): 16859-16865. [35] MORIMOTO T, AKAGI T, DOHTA S, et al. Development of flexible displacement sensor using ultrasonic sensor for flexible pneumatic robot arm[J]. Procedia Computer Science, 2015, 76: 107-112. -



计量
- 文章访问数: 1431
- HTML全文浏览量: 432
- PDF下载量: 38
- 被引次数: 0

 渝公网安备50010802005915号
渝公网安备50010802005915号