

Sliding Mode Formation Optimization for Multi-Agent Systems With Unknown Disturbances in Predefined Time
-
摘要: 针对无领导者的多智能体系统,研究未知干扰下实现任意预设时间分布式编队优化的问题,最小化所有智能体局部强凸函数构成的全局代价函数. 提出一类基于滑模控制的编队优化算法,能够在用户预设的时间内实现多智能体系统的编队控制. 该算法分为三个部分:首先,采用积分滑模控制策略,引导预设时间内每个智能体趋于滑模面,有效地抑制外部干扰;然后,设计协议控制引导每个智能体状态到达其局部代价函数的最小值点;最后,所有智能体实现无领导编队,且到达全局代价函数的最小值点. 该算法无需智能体共享邻居的梯度和Hesse矩阵信息,从而节约信息交换成本,可以处理高度非线性多值强凸代价函数. 数值实验的多个例子验证了设计控制协议算法的有效性和可靠性.Abstract: For leader-less multi-agent systems, the problem of distributed formation optimization in predefined time under unknown disturbances was studied, and the global cost function composed of local strongly convex functions for all agents was minimized. A class of formation optimization algorithms based on the sliding mode control was proposed to realize the formation control of multi-agent systems within the predefined time. The algorithm was divided into 3 parts: firstly, the integrated sliding mode control strategy was used to guide each agent to approach the sliding mode surface in the predefined time, and the external interference was effectively suppressed; then, the design protocol control was employed to guide each agent state to the minimum point of its local cost function; finally, the leaderless formation was realized for all agents to reach the minimum point of the global cost function. The algorithm does not require agents to share the gradients and Hessian matrix information of neighbors, thus saving the information exchange cost, and can deal with highly nonlinear multi-valued strongly convex cost functions. Several examples of numerical experiments demonstrate the effectiveness and reliability of the design control protocol algorithm.
-

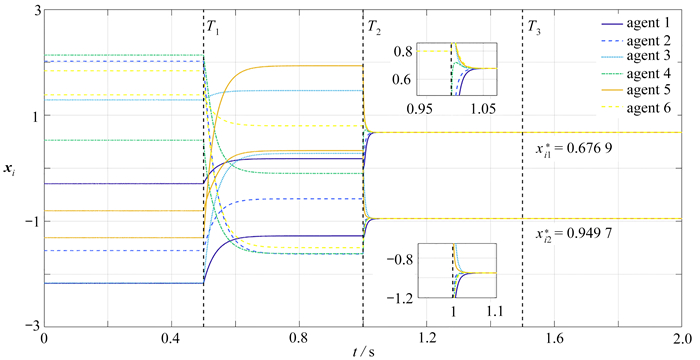
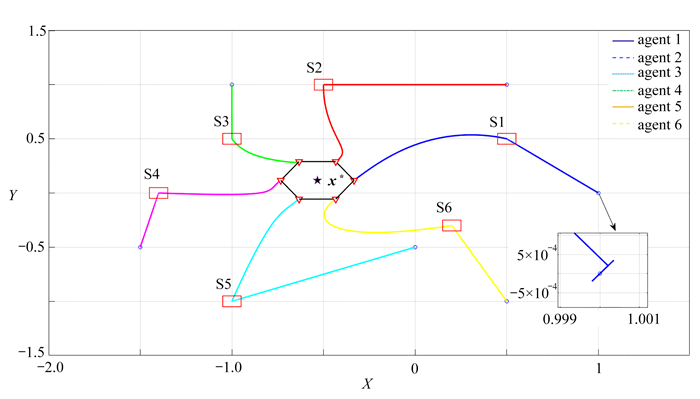
图 2 预设时间收敛的状态xi(t), i=1, 2, …, 6演化图
注 为了解释图中的颜色, 读者可以参考本文的电子网页版本, 后同.
Figure 2. State evolution xi, i=1, 2, …, 6 of the predefined-time convergence

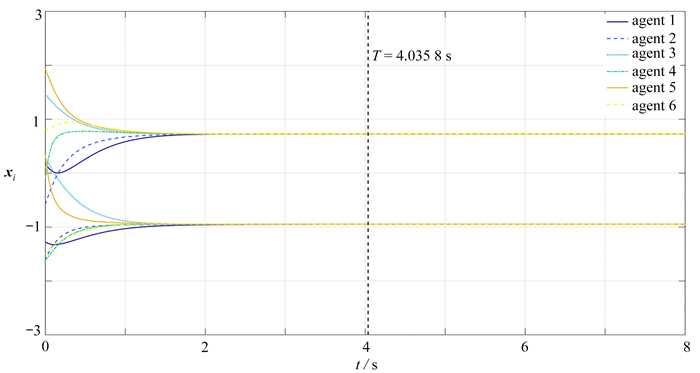
图 3 有限时间收敛的状态xi(t), i=1, 2, …, 6演化图
Figure 3. State evolution xi, i=1, 2, …, 6 of the finite-time convergence

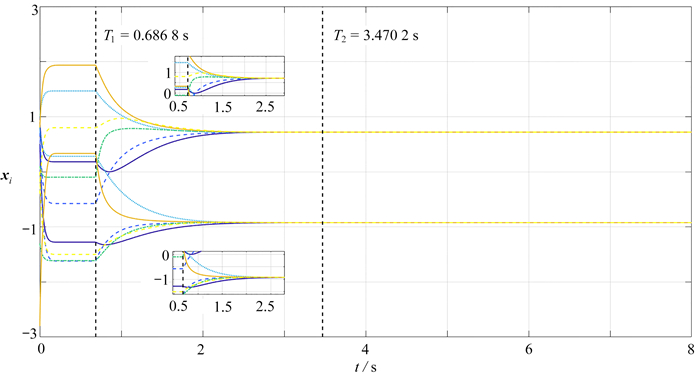
图 4 固定时间收敛的状态xi(t), i=1, 2, …, 6演化图
Figure 4. State evolution xi, i=1, 2, …, 6 of the fixed-time convergence

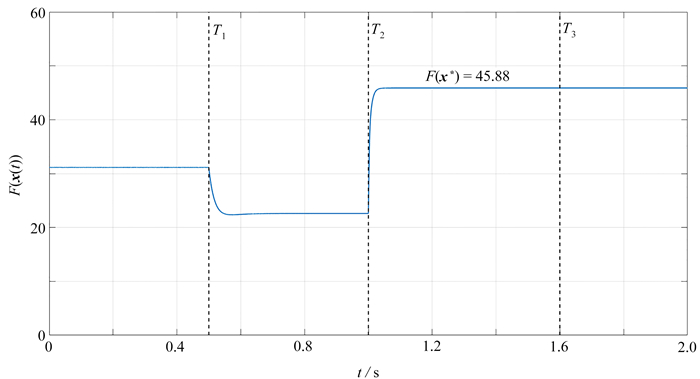
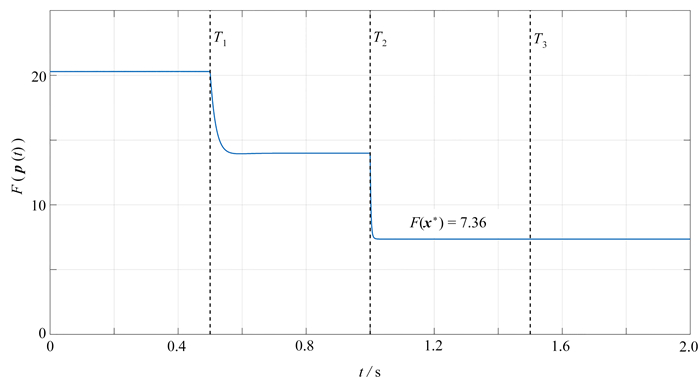
图 7 未知干扰下全局代价函数F( p(t))演化图
Figure 7. The evolution of F(p(t)) under unknown disturbances
表 1 时间数据对比分析
Table 1. Comparative analysis of time data
time to reach the local minimum/s time to reach the global minimum/s finite time no 4.032 8 fixed time 0.686 8 3.470 2 predefined time 1 1.5  下载: 导出CSV
下载: 导出CSV
-
[1] LIU Y, JIA Y. An iterative learning approach to formation control of multi-agent systems[J]. Systems & Control Letters, 2012, 61(1): 148-154. [2] REN W, BEARD R W. Distributed Consensus in Multi-Vehicle Cooperative Control[M]. London: Springer London, 2008: 71-82. [3] ZHAO Y, LIU Y F, WEN G H, et al. Distributed optimization for linear multiagent systems: edge and node-based adaptive designs[J]. IEEE Transactions on Automatic Control, 2017, 62(7): 3602-3609. doi: 10.1109/TAC.2017.2669321 [4] BRAUN P, GRVNE L, KELLETT C M, et al. A distributed optimization algorithm for the predictive control of smart grids[J]. IEEE Transactions on Automatic Control, 2016, 61(12): 3898-3911. doi: 10.1109/TAC.2016.2525808 [5] DOUGHERTY S, GUAY M. An extremum-seeking controller for distributed optimization over sensor networks[J]. IEEE Transactions on Automatic Control, 2017, 62(2): 928-933. doi: 10.1109/TAC.2016.2566806 [6] ZHU Y, REN W, YU W, et al. Distributed resource allocation over directed graphsvia continuous-time algorithms[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(2): 1097-1106. doi: 10.1109/TSMC.2019.2894862 [7] NEDIC A. Distributed gradient methods for convex machine learning problems in networks: distributed optimization[J]. IEEE Signal Processing Magazine, 2020, 37(3): 92-101. doi: 10.1109/MSP.2020.2975210 [8] YAN Y, CHEN Z, VARADHARAJAN V, et al. Distributed consensus-based economic dispatch in power grids using thepaillier cryptosystem[J]. IEEE Transactions on Smart Grid, 2021, 12(4): 3493-3502. doi: 10.1109/TSG.2021.3063712 [9] WANG X, HONG Y, JI H. Distributed optimization for a class of nonlinear multiagent systems with disturbance rejection[J]. IEEE Transactions on Cybernetics, 2016, 46(7): 1655-1666. doi: 10.1109/TCYB.2015.2453167 [10] WANG X, LI S, WANG G. Distributed optimization for disturbed second-order multiagent systems based on active antidisturbance control[J]. IEEE Transactions on Neural Networks and Learning Systems, 2019, 31(6): 2104-2117. [11] FENG Z, HU G, CASSANDRAS C G. Finite-time distributed convex optimization for continuous-time multiagent systems with disturbance rejection[J]. IEEE Transactions on Control of Network Systems, 2019, 7(2): 686-698. [12] GONG P, WANG Q G, AHN C K. Finite-time distributed optimization in unbalanced multiagent networks: fractional-order dynamics, disturbance rejection, and chatter avoidance[J]. IEEE Transactions on Automation Science and Engineering, 2025, 22: 6691-6701. doi: 10.1109/TASE.2024.3452472 [13] HONG H, BALDI S, YU W, et al. Distributed time-varying optimization of second-order multiagent systems under limited interaction ranges[J]. IEEE Transactions on Cybernetics, 2022, 52(12): 13874-13886. doi: 10.1109/TCYB.2021.3128051 [14] SONG Y F, CHEN W S. Finite-time convergent distributed consensus optimisation over networks[J]. IET Control Theory & Applications, 2016, 10(11): 1314-1318. [15] SHI X, XU X, CAO J, et al. Finite-time convergent primal-dual gradient dynamics with applications to distributed optimization[J]. IEEE Transactions on Cybernetics, 2023, 53(5): 3240-3252. doi: 10.1109/TCYB.2022.3179519 [16] ZAK M. Terminal attractors in neural networks[J]. Neural Networks, 1989, 2(4): 259-274. doi: 10.1016/0893-6080(89)90036-1 [17] POLYAKOV A. Nonlinear feedback design for fixed-time stabilization of linear control systems[J]. IEEE Transactions on Automatic Control, 2012, 57(8): 2106-2110. [18] WANG X, WANG G, LI S. A distributed fixed-time optimization algorithm for multi-agent systems[J]. Automatica, 2020, 122: 109289. [19] GARG K, BARANWAL M, PANAGOU D. A fixed-time convergent distributed algorithm for strongly convex functions in a time-varying network[C]// 2020 59th IEEE Conference on Decision and Control (CDC), Jeju, Republic of Korea. IEEE, 2021: 4405-4410. [20] LI Y, HE X, XIA D. Distributed fixed-time optimization for multi-agent systems with time-varying objective function[J]. International Journal of Robust and Nonlinear Control, 2022, 32(11): 6523-6538. doi: 10.1002/rnc.6157 [21] YU Z, YU S, JIANG H, et al. Distributed fixed-time optimization for multi-agent systems over a directed network[J]. Nonlinear Dynamics, 2021, 103(1): 775-789. [22] SÁNCHEZ-TORRES J D, GÓMEZ-GUTIÉRREZ D, LÓPEZ E, et al. A class of predefined-time stable dynamical systems[J]. IMA Journal of Mathematical Control and Information, 2018, 35(S1): i1-i29. [23] GONG P, HAN Q L. Distributed fixed-time optimization for second-order nonlinear multiagent systems: state and output feedback designs[J]. IEEE Transactions on Automatic Control, 2024, 69(5): 3198-3205. [24] XU X, YU Z, JIANG H. Fixed-time distributed optimization for multi-agent systems with input delays and external disturbances[J]. Mathematics, 2022, 10(24): 4689. [25] SONG Y, WANG Y, HOLLOWAY J, et al. Time-varying feedback for regulation of normal-form nonlinear systems in prescribed finite time[J]. Automatica, 2017, 83: 243-251. [26] JIMÉNEZ-RODRÍGUEZ E, MUÑOZ-VÁZQUEZ A J, SÁNCHEZ-TORRES J D, et al. A Lyapunov-like characterization of predefined-time stability[J]. IEEE Transactions on Automatic Control, 2020, 65(11): 4922-4927. [27] DE VILLEROS P, SÁNCHEZ-TORRES J D, MUÑOZ-VÁZQUEZ A J, et al. Distributed predefined-time optimization for second-order systems under detail-balanced graphs[J]. Machines, 2023, 11(2): 299. [28] GONG X, CUI Y, SHEN J, et al. Distributed optimization in prescribed-time: theory and experiment[J]. IEEE Transactions on Network Science and Engineering, 2022, 9(2): 564-576. [29] JIMÉNEZ-RODRÍGUEZ E, ALDANA-LÓPEZ R, SÁNCHEZ-TORRES J D, et al. Consistent discretization of a class of predefined-time stable systems[J]. IFAC-Papers on Line, 2020, 53(2): 628-633. [30] DE VILLEROS P, SÁNCHEZ-TORRES J D, DEFOORT M, et al. Predefined-time formation control for multiagent systems-based on distributed optimization[J]. IEEE Transactions on Cybernetics, 2023, 53(12): 7980-7988. -

计量
- 文章访问数: 124
- HTML全文浏览量: 45
- PDF下载量: 30
- 被引次数: 0

 渝公网安备50010802005915号
渝公网安备50010802005915号